Механические системы переменной структуры для решения задачи коррекции формы больших космических конструкций
В.И. Буякас,
вед.н.с, д.ф.-м.н., bujakas@yandex.ru,
ФИАН им. П.Н. Лебедева РАН, г. Москва
В процессе эксплуатации больших космических
конструкций – антенн, фазированных решеток, крупногабаритных отражателей,
больших мачт – может возникнуть необходимость в коррекции формы изделии ранее
собранных или автоматически раскрытых на орбите. В работе рассматривается возможность
использования механических конструкций переменной структуры для решения этой задачи. С этой целью в конструкцию
вводится новый тип исполнительных механизмов, каждый из которых может
находиться в одном из двух устойчивых состояниях. Переключение таких механизмов
переводит конструкцию из статически неопределимого
состояние в статически определимое. Регулирование формы возникающей статически
определимой конструкцией осуществляется традиционными исполнительными механизмами.
Приводится пример.
During operation of large space structures –
antennas, phased arrays, large-size reflectors, large
masts – it may be necessary to correct the shape of the design previously assembled
or automatically disclosed in orbit. The paper considers the possibility to use
mechanical design of variable structure to solve shape control problem for
large space structures. The new type of actuators is proposed and studied.
В процессе
эксплуатации больших космических конструкций – антенн, фазированных решеток,
крупногабаритных отражателей, больших мачт – может возникнуть необходимость в
коррекции формы изделии ранее собранных или автоматически раскрытых на
орбите. Большие статически определимые структуры обладают
важным, с точки зрения управления формой конструкции, свойством [1, 2]:
освобождение произвольной связи приводит к возникновению механизма с одной
степенью свободы; выполняя часть связей регулируемыми, можно менять форму
конструкции (взаимное расположение ее элементов) малыми усилиями. При этом в
конструкции не возникают напряжения, и не требуется синхронизация работы
исполнительных механизмов. Однако жёсткостные характеристики
таких конструкций в ряде случаев оказываются недостаточно высокими.
Для разрешения
этого противоречия предлагается ввести в конструкцию, наряду с обычными, новый тип исполнительных механизмов – “управляемые
фиксаторы”. Каждый такой элемент может находиться в одном из двух состояний (да
– нет ) и, переходя из одного состояние в другое,
вводить в конструкцию или исключать из нее одно кинематическое ограничение.
Примером может служить телескопическая
штанга, которую можно фиксировать в произвольном
положении, либо цилиндрический шарнир с управляемым стопором.
Конструкция строится таким
образом, что при переключении исполнительного механизма II – го рода из одного положения в другое структура переходит
из статически неопределимого состояния в статически определимое и наоборот.
При
использовании таких механизмов возникает система с переменной структурой: в
одном состоянии (рабочем) конструкция оказывается статически неопределимой и
обладает требуемыми жесткостными характеристиками, в другом (состояние
коррекции формы) – статически определимой. При этом коррекция формы осуществляется
обычными исполнительными механизмами малыми усилиями.
Управление
новым типом механизмов осуществляется без непрерывной обратной связи, в
результате коррекции в конструкции не возникают новые напряжения.
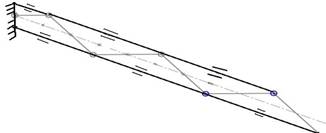
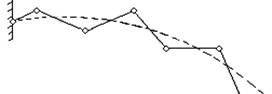
Ниже
приведенные рисунки демонстрируют
предлагаемую идею. Слева представлены
различные формы составного регулируемого стержня. В узлах составного стержня
расположены традиционные исполнительные механизмы (исполнительные
механизмы I- го рода). При больших размерах стержней конструкция
может оказаться недостаточно жесткой.
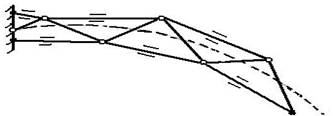
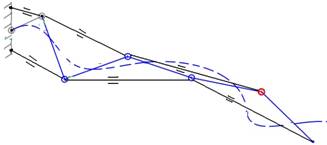
Справа показаны различные состояния регулируемой фермы, часть связей
которой снабжена новыми исполнительными механизмами. Освобождение одной или
нескольких связей, снабженных исполнительными механизмами II – го рода, позволяет регулировать форму
конструкции традиционными исполнительными механизмами. После завершения регулирования формы конструкция
фиксируется в новом положении. Регулирование осуществляется малыми усилиями и
не приводит к возникновению напряжений в конструкции.
|
Составной
регулируемый стержень |
Регулируемая
ферма |
|
|
|
|
|
|
|
|
|
|
|
|



На рисунках
используются следующие обозначения: