Мультиагентные модели в
системах управления жизненным циклом сложных технических изделий
В.О. Карасев,
гл. спец. отд. САЛП, студ., karasev@cals.ru,
АО НИЦ «Прикладная логистика», МГТУ им. Баумана, г. Москва
В докладе поставлены основные задачи систем управления
жизненным циклом сложных технических изделий. Приведены основные сведения о
мультиагентных системах. Описана модель
системы управления жизненным циклом изделия, основанная на мультиагентных
технологиях. Сообщается о практических результатах применения мультиагентных
технологий при разработке систем управления жизненным циклом изделий.
Set
main goals of hi-tech production lifecycle management. Listed
information about multi-agent systems. Described lifecycle management
system model, created using multi-agent technologies. Reported
about practical results of multi-agent technologies applications in development
of lifecycle management systems.
В современных условиях управление жизненным циклом (ЖЦ) является одной из основных задач при разработке и производстве сложных технических
изделий. Применение этих технологий позволяет значительно сократить издержки и
повысить качество продукции.
Управление жизненным
циклом (УЖЦ) изделия – это
многоуровневое управление свойствами изделия на всех стадиях его ЖЦ[1].
Основной целью данной деятельности является
эффективная реализация программ и
выполнения заданных требований в области развития изделий при минимизации
стоимости ЖЦ. Данная цель достигается путем управляемого воздействия на
конструкцию изделий, производственную и эксплуатационную среду, а также систему
технической эксплуатации. Для эффективного применения методик УЖЦ необходима
как методическая, так и информационная поддержка. Для решения задач информационной
поддержки УЖЦ применяются системы УЖЦ, в
том числе информационные системы
автоматизированного управления жизненным циклом изделий (ИСАУ ЖЦ). Общая схема
ИСАУ ЖЦ приведена на рисунке 1.
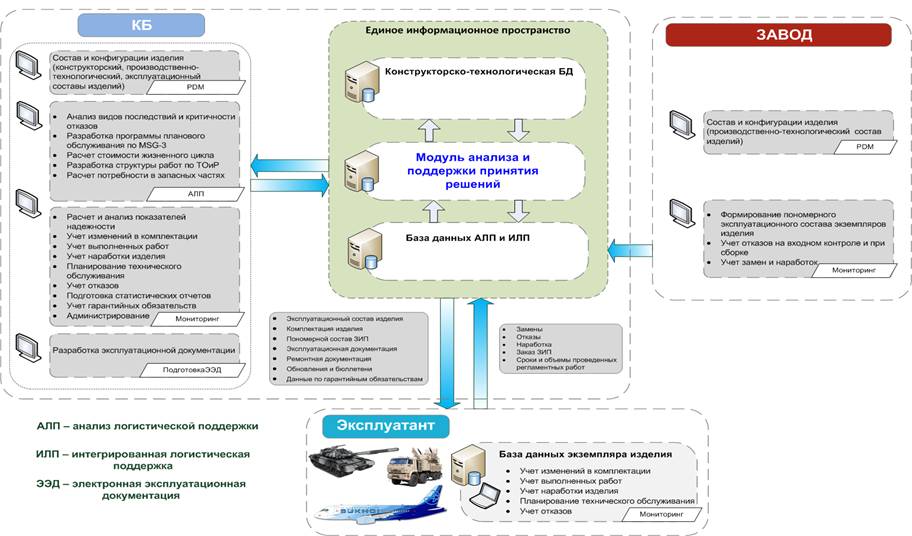
рис. 1 Структура ИСАУ ЖЦ
изделия
Задачу системы УЖЦ можно рассматривать как задачу
теории управления. Необходимо отметить, что системы УЖЦ являются
распределенными системами, как во времени, так и в пространстве, т.к. охватывают
несколько этапов ЖЦ изделия. Таким образом, в рамках теории управления систему
УЖЦ целесообразно рассматривать как систему,
относящуюся к классу
распределенных интеллектуальных систем, а ее разработку
осуществлять на основе технологий мультиагентных систем (МАС).
Мультиагентные системы — это системы, состоящие из
автономных интеллектуальных агентов, взаимодействующих друг с другом и пассивной
среды, в которой агенты существуют и на которую также могут влиять. В первую
очередь речь идёт о программных системах или моделях, описывающих процесс их
работы, их поведение.
Понятие «агент» последнее время было адаптировано
ко многим областям прикладного и и системного программирования,
исследованиям в областях искусственного интеллекта и распределенных систем.
Одно из первых формальных описаний агентов МАС
приведено в книге Л. Гессера “MACE: A flexible testbed for distributed
AI research [2]. По Гессеру Агенты обладают
следующими свойствами:
·
Класс (class) – агенты
организовывались в группы, называемые классами и идентифицируемые по имени
класса.
·
Имя (name) – каждому
агенту присваивалось уникальное в классе имя, таким образом, в рамках системы агента
можно было идентифицировать парой строк (класс, имя).
·
Роль (roles) –
описание роли, выполняемой агентом в своем классе.
·
Навыки (skills) –
множество возможностей описываемого агента по сведениям описывающего агента.
·
Цели (goals) –
множество целей, которых описываемый агент хочет достичь по сведениям
описывающего агента.
·
Планы (plans) –
представление описывающего агента о том, как описываемый агент будет достигать
свои целей.
Агенты
могут общаться с внешней средой посредством сообщений (в том числе возникающих
в процессе взаимодействия пользователя с человеко-машинным интерфейсом
эргатического агента). Между собой агенты взаимодействуют через единое
информационное пространство, реализованное в виде единой БД с возможностью
доступа через сеть. Так же одной из основных характеристик агента является возможность
совершать «действия».
В данном докладе рассматривается
модель, в которой агентами являются различные автоматизированные рабочие места
(АРМ) ИСАУ УЖЦ. ИСАУ ЖЦ является распределенной многопользовательской интерактивной системой, разрабатываемой для
управления ЖЦ изделий сложного машиностроения, в том числе бронетанковой
техники. Основной задачей системы является предоставления лицам, принимающим решения
(ЛПР) отчетов, позволяющих выявить проблемные места в жизненном цикле изделий,
а так же оценить его стоимость и необходимые инвестиции для создания и
поддержания системы эксплуатации парка изделий.
Большинство
существующих систем, несмотря на графический интерфейс и мощную систему
справки, требуют серьезных усилий со стороны потенциального
пользователя для их освоения. С помощью агентов можно построить интерактивную
систему, которая будет не просто принимать и выполнять
команды пользователя, а активно и интеллектуально взаимодействовать с ним,
стремясь к достижению общих целей. Конкретным
примером такой системы является ИСАУ ЖЦ БТТ..
При работе над
практической задачей создания МАС ИСАУ ЖЦ БТТ была создана модель данной
распределенной системы. После получения мультиагентной модели ИСАУ ЖЦ
появляется возможность описать данную модель формально, исследовать ее свойства
и применить существующие методики для исследования и оптимизации модели перед
ее реализацией на практике. Некоторые методы исследования МАС предложены в [3]. В частности:
· описание работы МАС с
помощью различных логических конструкций, введения специальных операторов для
описания работы агентов,
· вероятностный подход, при
котором некоторые этапы работы системы рассматриваются как подверженные
действию случайных факторов
· выделение некоторого
семейства МАС и дальнейшее исследование его свойств.
Довольно развит логический подход к описанию
деятельности отдельных агентов и системы агентов в целом. В это области можно
выделить интенционистскую логику Коэна-Левескью,
описывающую поведение агента через его внутренние свойства, такие как цели,
знания и т.п. Вообще для логического подхода к анализу МАС свойственно использование
логики первого порядка дополненной средствами, характеризующими изменчивость и
релятивизм определения истины.
Однако логический подход позволяет приходить лишь к
очень общим результатам, касающихся возможностей МАС. Что же касается
верификации системы, проверки и вывода утверждений, касающихся её поведения в
процессе работы, то и тут существуют различные подходы.
Поэтому для изучения свойств модели было решено
сформировать ее формальное описание в виде отдельных взаимодействующих
подсистем и агентов. Сформировать задачи, возможности и цели отдельных агентов
и разработать действующий макет (прототип) данной распределенной системы и с
его помощью изучить возможность применения
принципов разработанной модели на практике.
Разработанная модель системы и их
взаимодействие представлены на рисунке 2.
рис. 2 Схема взаимодействия
агентов распределенной ИСАУ ЖЦ
Представленные на рисунке 2 агенты работают
совместно в едином информационном пространстве
распределенной ИСУ ЖЦ . Данная система состоит
из нескольких так же пространственно-распределенных подсистем:
–
подсистема Анализа логистической поддержки
(АЛП);
–
подсистема Электронной эксплуатационной документации (ЭЭД);
–
подсистема Электронных каталогов;
–
подсистема Мониторинга технической эксплуатации (МТЭ);
–
подсистема Технико-экономического анализа (ТЭА);
–
подсистема Обеспечения технической эксплуатации (ОТЭ).
Подсистемы связаны между собой как непосредственно
с помощью онлайн каналов связи, так и с помощью интеграционных механизмов на
основе обменных файлов. В данной модели каждый агент системы представлен в виде
отдельной эргастической системы, состоящей из соответствующего АРМ и оператора
данного АРМ. Приведем классификацию агентов системы (АРМ) и рассмотрим
некоторые выполняемые агентами функции более подробно. Агентов в
рассматриваемой модели можно классифицировать различными способами, например на
основе принадлежности к определенной подсистеме, или по выполняемым агентом функциям.
В рассматриваемой системе можно разделить агентов на следующие классы.
Служебные
агенты:
–
АРМ АЛП-1 – АРМ администратора подсистемы АЛП.
–
….
Агенты сбора
информации:
–
АРМ ЭЭД-2 – АРМ ввода данных о шаблонах ЭЭД.
–
АРМ ТЭА-2 – АРМ ввода данных об изделии и системе его технической
эксплуатации.
–
АРМ ОТЭ-1 – АРМ ввода данных о модели взаимодействия производителя и эксплуатанта.
–
….
Агенты
создания информации и знаний:
–
АРМ ЭЭД-3 – АРМ разработки ЭЭД.
–
АРМ ЭК-3 – АРМ разработки ЭК.
–
АРМ ОТЭ-2 – АРМ формирования программы обеспечения технической эксплуатации.
Агенты
актуализации информации и знаний:
–
АРМ ЭЭД-4 – АРМ просмотра и сопровождения ЭЭД.
–
АРМ ЭК-4 – АРМ просмотра и сопровождения ЭК.
–
АРМ М-3 – АРМ ведения БД об эксплуатации изделий.
Агенты –
аналитики:
–
АРМ АЛП-3 – АРМ анализа систем изделия.
–
АРМ ТЭА-4 – АРМ технико-экономического анализа и формирования отчетной информации.
–
…..
Исходя из приведенной классификации, можно
проследить «логистику знаний» внутри распределенной ИСАУ ЖЦ. Данная методология
была предложена в диссертации М.П Пашкина в 2005 году
[4]. Она ориентирована на управление
знаниями с целью извлечения, интеграции и транспортировки адекватных знаний из
распределенных источников в правильном контексте соответствующим пользователям
в заданное время для принятия решений в прикладных проблемных областях. Схема логистики
знаний в описываемой модели представлена на рисунке 3.

рис. 3 «Логистика знаний»
ИСАУ ЖЦ
Функции, задачи, а так же механизмы каждого агента
друг с другом и с объединяющим
их информационном пространстве были подробно описаны при моделировании системы.
Например, Агент АРМ АЛП-3 выполняет следующие функции:
–
Проверка работы с данными о логистической
структуре изделия.
–
Установление связей между элементами логистической структуры изделия и логистической структуры функций.
–
Проверка выполнения анализа видов, последствий и критичности отказов.
–
Выполнение анализа работ по обслуживанию, обеспечивающих заданные требования
к надежности изделия.
–
….
Приведенный список функций не полон, однако
позволяет примерно представить, что каждый агент на самом деле представляет
собой отдельную достаточно сложную систему, в которой необходимо, в том числе,
и участие человека-оператора. Каждый такой агент может быть представлен МАС с
помощью декомпозиции, что в принципе позволяет рассматривать МАС ИСАУ ЖЦ как рекурсивную МАС. Построение модели рекурсивной МАС и
уменьшение роли оператора в действиях агента достаточно сложные задача, которая
выходит за рамки данной статьи, однако являются перспективными для дальнейших
исследований.
На основе приведенной модели МАС был построен
прототип распределённой МАС: ИСАУ ЖЦ БТТ. Прототип позволил доказать
работоспособность модели, подтвердить ее адекватность и сформировать требования
к промышленной системе ИСАУ ЖЦ БТТ.
Литература
1. Судов Е.В., Левин А.И.,
Петров А.Н., Петров А.В., Бороздин А.В. Анализ логистической поддержки. Теория
и практика, М.: ООО Издательство «Информ-Бюро», 2014.
260с.
2. Gasser, L. MACE: A flexible testbed for
distributed AI research. / L. Gasser, C. Braganza, N. Hermann. // Distributed
Artificial Intelligence.— 1987.
3. Зайцев
И.Д. Многоагентные системы в моделировании
социально-экономических отношений: Исследование поведения и верификация свойств
с помощью цепей Маркова. Диссертация. Новосибирск 2014г.
4. Пашкин
М.П. Разработка и реализация многоагентной
системы логистики знаний для информационной поддержки принятия решений. Диссертация.
Санкт-Петербург. 2005г.