Проектирование систем
управления подвижными объектами с использованием встраиваемых
интеллектуальных
компонентов
В.О. Чинакал,
в.н.с., к.т.н., доц., chinakal@ipu.ru,
ИПУ РАН, г. Москва
Рассматриваются вопросы разработки и применения встроенных
интеллектуальных компонентов (ВИК) для комплексной системы управления
подвижным динамическим объектом (ПДО). Разработана структура распределенной
системы ВИК с использованием продукционной модели представления знаний и
методов ускоренного вывода на базе матричных вычислений. Приведены примеры
сценариев изменения управления движением ПДО в зависимости от изменений внешней
обстановки.
Article describe the questions of development
and application of the inbuilt intellectual components (IIC) for complex
control system by movable dynamic object (MDO). The structure of the
distributed system IIC is worked out with the use of productional model of
representation of knowledge and methods of speed-up conclusion on the base of
matrix calculations. Provided examples of scripts changes the control of MDO
according to the change external environment.
Введение
Успешная реализация современных повышенных требований к обеспечению
эффективной и безопасной эксплуатации различных подвижных динамических объектов
(ПДО) существенно зависит от качества проектных решений по созданию комплексных
систем управления (КСУ) такими объектами. Наиболее жесткие требования к
реализации задач контроля и управления в КСУ предъявляются при использовании
автоматических режимов эксплуатации ПДО, например, при создании КСУ автономными
необитаемыми подводными аппаратами (АНПА) [1]. Штатная КСУ такого аппарата должна
обеспечивать контроль и координированное управление подсистемами и всеми
техническими средствами управления (ТСУ), реализуя автоматическое решение задач управления
пространственным движением АНПА с учетом динамики объекта, запаса
энергоресурсов, требований на выполнение миссии и различных траекторных
ограничений. Эти и другие особенности автоматического управления автономными ПДО
требуют существенного повышения качества работы КСУ.
Одним из перспективных путей повышения качества работы штатной КСУ как
на этапе проектирования, так и во время эксплуатации ПДО является использование
современных интеллектуальных методов (ИМ) при решении сложных задач контроля и
управления ПДО. К таким сложным задачам относятся, например, задачи определения
возможных статических и динамических траекторных угроз, корректировки
траекторий движения и выбора управления с учетом всех типов угроз и требований
минимизации необходимых энергозатрат, удержание движения ПДО на заданной
эквидистанте от резко переменного микрорельефа и различных препятствий и т.п.
В [2] рассматривались вопросы разработки общей интеллектуальной системы
поддержки принятия решений, предназначенной для операторов различных постов
управления ПДО. В [3] рассмотрен подход с использованием
локальных «активных» интеллектуальных
компонентов (агентов), определены их основные функции, дополняющие функции
штатной КСУ объекта управления. В данной работе рассматриваются возможности
создания распределенной интеллектуальной системы поддержки автоматического
решения сложных задач контроля и управления (ИСПУ), предназначенной для
обеспечения более эффективной и безопасной работы КСУ ПДО без вмешательства
операторов. Ниже рассмотрены возможности создания ИСПУ ПДО с использованием
локальных встраиваемых интеллектуальных компонентов (ВИК), взаимодействующих
между собой и подсистемами КСУ ПДО.
1.
Основные требования к проектированию ИСПУ
При проектировании штатного алгоритмического (АО) и программного (ПО)
обеспечения КСУ и ее отдельных подсистем обычно используются различные пакеты
САПР, SCADA-системы, и
другие средства, позволяющие сконфигурировать типовое АО и ПО, реализуемое
затем в КСУ на стандартных распределенных микропроцессорных средствах и сетевых
структурах. Для создания и применения в КСУ интеллектуальных средств поддержки
управления ПДО можно использовать различные средства [4] - от универсальных
пакетов типа G2 фирмы Gensym до цифровых нейронных сетей, элементов нечеткой
логики, универсальных и специализированных языков программирования и т.п.
Рациональный выбор средств проектирования ИСПУ определяется концепцией ее
построения, назначением и возможностями использования ВИК и требованиями к
получению, обработке и обмену информацией между всеми компонентами ИСПУ и
аппаратно-программными средствами
штатной КСУ ПДО.
Выделим следующие основные общие
требования к созданию и работе ИСПУ и ВИК:
- удобство описания и изменения локальных моделей представления знаний
(МПЗ) по проблематике конкретных
задач контроля и управления ПДО;
- возможность простой индивидуальной настройки, изменения и
дополнения локальных баз данных (БД) и
баз
знаний (БЗ) без привлечения
высококвалифицированных специалистов;
- формирование БД и БЗ ВИК в соответствии с классами решаемых задач с
помощью единого редактора;
- существенное сокращение общей размерности МПЗ и БЗ локальных ВИК;
- повышение динамических характеристик работы отдельных ВИК и ИСПУ для
обеспечения поддержки работы
КСУ в жестком реальном времени;
- построение МПЗ на базе продукционных правил с использованием матричных
вычислений, уровневой структу-
ризации МПЗ и применения «к»- значных логик [5];
- модульное построение ПО ВИК на основе типового микроядра и локальных наборов БД и БЗ;
- возможность использования встроенных систем имитационного
моделирования (СИМ), специализированных на
решение конкретных задач в
реальном и ускоренном масштабе времени (прогноз состояния, выбор управления).
Разработка ВИК ориентирована на поддержку решения как традиционных задач
контроля и управления в КСУ ПДО, так и
на автоматизацию решения ряда специальных задач. К таким задачам относятся:
- автоматическая настройка работы МПЗ на актуальные источники данных от
аппаратно-программных средств;
подсистем ПДО с учетом возможных
отказов, исчерпания ресурса источников данных или воздействия неблаго-
приятных факторов,
препятствующих получению достоверной информации;
- прогноз расходуемых ресурсов технических средств управления
и выбор ТСУ с достаточным запасом ресурсов;
- автоматизация оперативного анализа текущего состояния объекта,
изменений внешней обстановки, включая
выявление траекторных угроз;
- формирование оценки текущей ситуации и прогноза ее
возможного развития;
- формирование альтернативных вариантов управления в зависимости от
ситуации
- выявление возможных причин возникновения отклонений и нарушений в
работе источников данных и ТСУ;
- обнаружение предпосылок возникновения нештатных ситуаций для класса
задач контроля и управления ПДО.
Рассмотрим общую структуру ИСПУ, разработанную на основе анализа
основных требований к построению ИСПУ и решаемым задачам контроля и управления
ПДО.
2.
Разработка структуры ИСПУ
На рис.1 представлена общая структура ИСПУ, включающая локальные ВИК,
объединенные в подсистемы, и представлены ее основные связи со штатной системой
управления объектом КСУ.

рис.1 Общая
структура ИСПУ
Условно к основным подсистемам ИСПУ можно отнести группы ВИК,
реализующие следующие задачи:
- контроль
работы ТСУ и анализ доступных ресурсов ТСУ;
- оценка
координат и параметров движения ПДО и анализ данных о внешней обстановке с
использованием обработ-
ки
данных от интегрированной навигационной системы (ИНС),
гидроакустического комплекса (ГАК), эхолокацион-
ной
системы (ЭЛС), технического зрения (ТЗ) и других средств;
- анализ
статических и динамических траекторных угроз (АТУ), генерация целей и подцелей
(ГЦ) и выбор сценария
(ВС) для корректировки текущего управления в
зависимости от типа угроз;
-
определение альтернативных вариантов управления для системы управления движением
(СУД) и системы
управления манипуляторами (СУМ).
Монитор ИСПУ обеспечивает координацию работы ИСПУ и локальных ВИК, а
также взаимодействие ВИК с сервером приложений и подсистемами штатной КСУ ПДО с
помощью локальных сетей (рис.2).
На рис.2 представлена укрупненная функциональная блок-схема ИСПУ. На
схеме показаны:
- локальные
ВИК с соответствующими БД и БЗ (левый столбец схемы);
- основные
функции, выполняемые с использованием ВИК (средний и правый столбец схемы);
- основные
блоки подсистемы имитационного моделирования (СИМ) (в нижней части схемы).
С помощью СИМ обеспечивается моделирование в реальном и ускоренном
времени различных ситуаций, определение траекторных угроз и вариантов
управления для КСУ ПДО. В состав СИМ входят модели внешней среды и возмущений,
модели ТСУ, модели динамики объекта, модели датчиков, систем измерения и
системы управления ПДО, а также БД СИМ, содержащая вспомогательные данные о
параметрах моделей и конфигурировании задач, решаемых на СИМ. Монитор
встроенной подсистемы имитационного моделирования (Монитор СИМ) координирует
работу соответствующих блоков СИМ в реальном и ускоренном времени, обеспечивая
получение численных оценок эффективности различных вариантов управления ПДО.
При построении ИСПУ использован событийный подход, модульное построение
подсистем, использование вложенных, динамически выбираемых сценариев работы
ИСПУ (стратегические, тактические, рабочие сценарии), мониторный принцип
управления основными этапами работы ИСПУ. Центральный монитор ИСПУ координирует
работу всех блоков ИСПУ, обеспечивая их бесконфликтное взаимодействие,
получение, хранение и обработку входной, экспертной и выходной информации, исполнение
сценариев работы, сформированных с использованием ВИК.
Группы ВИК, используемые в ИСПУ, ориентированы на поддержку решения
следующих задач: ВИК1 –автоматическая настройка работы МПЗ (БЗ1) на актуальные
источники данных от аппаратно-программных средств КСУ; ВИК2 – анализ условий,
событий, штатных и аварийных ситуаций, генерация и проверка динамических рабочих
сценариев ИСПУ; ВИК3 – анализ состояния ПДО, ТСУ, прогноз расходуемых ресурсов
технических средств управления и выбор ТСУ с достаточным запасом
ресурсов, генерация, проверка и отбор гипотез о состоянии объекта, ТСУ и внешней
обстановки; ВИК4 -– генерация, оценка и отбор альтернативных вариантов
управления в зависимости от текущих и прогнозируемых ситуаций; ВИК5 –
комплексный анализ данных о параметрах пространственного движения и навигации
ПДО, траекторных угрозах, построение границ предупредительных и критических зон
безопасного управления ПДО.
Для обеспечения эффективного и безопасного управления ПДО необходима
оперативная автоматическая оценка ситуации, путем проверки ряда гипотез в
ускоренном времени на основе соответствующих продукционных правил и сформированного
расширенного вектора текущих и прогнозируемых событий. Аналогично формируются и
проверяются гипотезы о выборе различных сценариев действий на основе
соответствующих продукционных правил и вектора возможных текущих и
прогнозируемых ситуаций. В соответствии с результатами текущих оценок ситуаций
и выбора сценария действий формируются соответствующие альтернативные варианты
управления объектом, из которых выбирается рекомендуемый текущий рабочий
вариант управления.
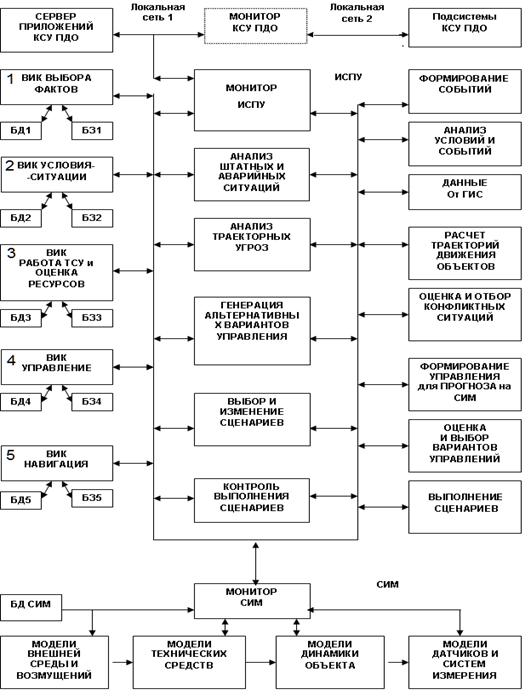
рис.2
Функциональная блок-схема ИСПУ
3.
Особенности построения модели представления знаний
С учетом сформулированных выше требований к проектированию ВИК модель
представления знаний (МПЗ) предлагается строить на основе матричных
представлений продукционных правил, уровневого представления знаний и
сценарного подхода. Общая модель МПЗ раделяется на следующие уровни: -
настройка базы фактов на актуальные источники данных; формирование оценок
событий; формирование ситуаций; выбор подцелей и формирование вложенных
сценариев обработки ситуаций; выбор стратегии управления для реализации
подцелей и целей при выполнении КСУ ПДО конкретной заданной миссии.
Сложные высказывания, например, формирование оценок ситуаций на основе
простых высказываний (событий) при матричном представлении правил, формируются с использованием нормальных конъюнктивных форм (cnf) и/или
нормальных дизъюнктивных форм (dnf). Для матричного представления с помощью cnf
и dnf используем две матрицы описаний А и В. Используя матрицу А для задания конъюнктов, а матрицу В – для
дизъюнктов можно представить в dnf s -
антицедентов (условий) соответствующих продукционных правил для n- мерного вектора событий.
Пусть X,U - n- мерные вектора событий, Y, W - m - мерный
вектор конъюнктов, Z - s –мерный
вектор дизъюнктов, A и В –
матрицы условий соответственно размерности (m*n) и (m*s), тогда
 , (1)
, (1)
 где (2)
где (2)
aij , bli-элементы матриц А и В, j=1,..n; i=1,...m; l=1,…s, aij![]() [-1,0,1]
[-1,0,1]![]() , bij
, bij![]() [-1,0,1].
[-1,0,1].
Значения aij=1 или bij=1 соответствуют
выполнению операций векторной конъюнкции с элементами UJ=XJ
для ![]() и
дизъюнкции при wl=yl
и
дизъюнкции при wl=yl ![]() . При aij=-1, или bij=-1 соответствуют выполнению операций векторной
конъюнкции при UJ=
. При aij=-1, или bij=-1 соответствуют выполнению операций векторной
конъюнкции при UJ=![]() XJ
или дизъюнкции при wl=
XJ
или дизъюнкции при wl=![]() yl
(что соответствует логическому отрицанию события). Значения равные 0
означают, что соответствующая переменная UJ или wl не входит
в сложное выражение. Учитывая, что lдаже в
случае использования уровневой модели МПЗ числа n, m и s могут быть
достаточно большие, а матрицы А и В сильно разрежены, при практической
реализации матричных методов использованы методы задания и работы со слабо
заполненными матрицами.
yl
(что соответствует логическому отрицанию события). Значения равные 0
означают, что соответствующая переменная UJ или wl не входит
в сложное выражение. Учитывая, что lдаже в
случае использования уровневой модели МПЗ числа n, m и s могут быть
достаточно большие, а матрицы А и В сильно разрежены, при практической
реализации матричных методов использованы методы задания и работы со слабо
заполненными матрицами.
Для иллюстрации применения матричных методов прямого и обратного
матричного вывода в МПЗ ВИК рассмотрим 2 простых примера (при k=2) по автоматическому выбору сценария выполнения
операций и действий при выявлении различных типов траекторных угроз.
4.
Примеры выбора сценариев при траекторных угрозах
Пример 1. Выбор сценария выполнения операций при
обнаружении статической угрозы (цель).
1. Определим спецификатор переменных для объединенного вектора событий
(факты), ситуаций (подцели), сценарии (цели):
- факты (события):
Х1-Наличие статических траекторных угроз, Х2-Расчет альтернативных
вариантов обхода,
Х3-Наличие динамических траекторных угроз, Х4 –Расчет альтернативных
вариантов расхождения,
Х5 – Есть запас по энергетике;
- подцели (ситуации/операции):
Х6 – Выбор варианта маневра обхода угрозы, Х7 – Выбор варианта маневра
уклонения,
Х8 – Расчет управления для выполнения маневра обхода угрозы, Х9 - Расчет
управления для выполнения
маневра уклонения;
- цели (сценарии):
Х10- Сценарий выполнения маневра обхода статических угроз,
Х11- Сценарий выполнения маневра уклонения при динамических угрозах.
2. Зададим правила определения подцелей и целей:
Х6=Х1&X2, X7=X3&X4, X8=Х5&Х6, X9=X5&X7, X10=X6&X8,
X11=X7&X9.
3. Зададим начальный объединенный вектор событий, целей и подцелей Х(0):
Исходные факты: Х1(0)=1, Х2(0)=1, Х3(0)=0, Х4(0)=0, Х5(0)=1,
Начальные значения целей и подцелей:
Х6(0)=Х7(0)=Х8(0)=Х9(0)=Х10(0)=Х11(0)=0.
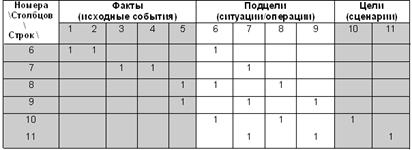
4. Зададим правила определения подцелей и целей в матричном виде
(табл.1). Так как правила в п.2 определены
в виде простых конъюнктов, то
используем только одну матрицу описаний –А.
Проверим
гипотезу достижения цели Х10 (Х10=1 ?) при заданных фактах и правилах.
Таблица
1
Фрагмент
матричного задания правил выбора сценария
5. Выполним последовательность матричных операций прямого логического
вывода, выполняя построчно операции по формуле (1).
Фрагмент
прямого матричного вывода
Таблица
2
Последовательность
векторов Х(i) на базе прямого матричного вывода
Достигается
цель Х10 (Х10=1), Цель Х11 не достигается (Х11=0)
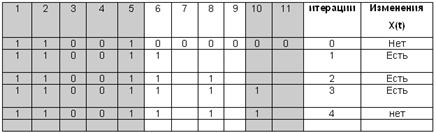
Пример 2. Проверим, какие факты (ситуации) запускают
сценарий выполнения операций при обнаружении динамической угрозы (задана цель
Х(11)=1). Правила те же, что и в табл.1.
Зададим начальный объединенный вектор событий, целей и подцелей Х(0):
Исходные факты: Х1(0)=0, Х2(0)=0, Х3(0)=1, Х4(0)=1, Х5(0)=1,
Начальные значения целей и подцелей:
Х6(0)=Х7(0)=Х8(0)=Х9(0)=Х10(0)=0; Х11(0)=1.
При обратном выводе операции выполняются в следующем порядке:
- по номеру цели Х(11)=1 определяется 1-ая строка условий (i=11) и номера переменных (Х7 и Х9), входящих в i-й конъюнкт цели;
- в Х(1) заносятся значения Х7(1)=1 и Х9(1)=1;
- в строки 3,4,5, заносятся +1 в соответствии с конъюнктами строк 7 и 9;
Больше изменений нет. Цель Х11 достигается (Х11=1), т.е. сценарий Х11
запускается, так как выполнены факты (ситуации) Х3(0)=1 и Х3(2)=1, Х4(0)=1 и
Х4(2)=1, Х5(0)=1 и Х5(2)=1.
Таблица
3
Фрагмент
обратного вывода при заданной цели

Выводы
Применение встраиваемых
интеллектуальных компонентов в аппаратно-программных средствах различных подсистем
комплексных систем управления подвижными динамическими объектами позволяет
значительно повысить эффективность использования традиционных алгоритмов
контроля и управления в отдельных подсистемах КСУ и объектом в целом.
Значительно расширяются возможности автоматической настройки КСУ на выполнение
ряда функций без вмешательства операторов, своевременного обнаружения
предпосылок возникновения возможных аварийных и нештатных ситуаций, проведения
оперативного автоматического анализа различных траекторных угроз и обеспечение
рационального выбора и использования имеющихся ресурсов технических средств
управления ПДО.
Литература
1. Киселев Л.В., Инзарцев А.В., Матвиенко Ю.В. О
некоторых задачах динамики и управления пространственным движением АНПА. //
Подводные исследования и робототехника. 2006 №2, стр. 13-26,
2. Борисов. В.Г., Данилова С.К., Чинакал
В.О. Повышение безопасности управления морскими подводными объектами на этапе
их проектирования. // Труды 17 Международной конференции «Проблемы управления
безопасностью cложных систем». 4 стр. ИПУ РАН. Москва. 2009.
3. Чинакал В.О. Об одном подходе к
повышению безопасности управления сложным промышленным объектом. // Труды XIX
Международной конференции «Проблемы управления безопасностью сложных систем –
2011» // Труды XIX Международной
конференции «Проблемы управления безопасностью сложных систем – 2011». Россия.–
М. РГГУ, 2011 стр. 443-447.
4. Рыбина Г.В. Основы построения
интеллектуальные систем: Учебное пособие. – М.: «Финансы и статистики», 2010. –
432 с.
5. Чинакал В.О. Применение
интеллектуальных средств в системе мониторинга распределенного промышленного
объекта. // Материалы пятой
международной конференции «Управление развитием крупномасштабных систем»
MLSD’2011. – М., ИПУ РАН, 2011, стр. 386-389.