Виртуальное 3D-моделирование
автоматизированных технологических операций для станков с ЧПУ
А.В. Балабанов,
с.н.с., к.т.н., fca07@mail.ru,
В.А. Ромакин,
с.н.с., к.т.н., insight.ru@gmail.com,
ИПУ РАН, г. Москва
В статье представлен метод разработки специализированных
программных систем 3D-моделирования
автоматизированных технологических операций для станков с ЧПУ. Метод содержит
формальные процедуры анализа и синтеза структур систем 3D-моделирования. На примере разработки
программной системы для 3D-моделирования
операций замены режущего инструмента обрабатывающего центра показано применение
разработанного метода на практике.
Управление современным
технологическим оборудованием с ЧПУ требует высокой профессиональной подготовки
оператора, которая может быть достигнута при помощи использования в процессе
обучения компьютерных тренажеров на основе 3D-моделей [1, 2] в сочетании с
практической работой на реальном оборудовании.
Взаимодействие оператора
с оборудованием должно осуществляться при помощи компьютерной системы
управления (КСУ) с развитыми средствами 3D-моделирования [3], которые позволяют
повысить эргономичность КСУ и уменьшить количество ошибок оператора.
Задачи 3D-моделирования, решаемые при создании
современных компьютерных тренажеров и КСУ, предъявляют повышенные требования к
сложности алгоритмов решения этих задач, а также к быстродействию и объему
памяти вычислительных систем. Поэтому, разработка компьютерных тренажеров и КСУ
на основе 3D-моделей
должна проводиться с применением формальных методов синтеза структур этих
систем (например, [4]).
В этой связи, в статье
предложен метод разработки специализированных программных систем 3D-моделирования автоматизированных
технологических операций для станков с ЧПУ, основанный на формальных процедурах
систематизации возможных вариантов реализации алгоритмов 3D-моделирования при помощи построения
обобщенных сетевых моделей структур систем и выборе наилучшего варианта
структурной организации системы при помощи поиска кратчайшего пути в сети по
критериям сложности программной реализации структур данных 3D-моделей. Далее показано применение
разработанного метода на примере создания специализированной программной
системы для 3D-моделирования
операций замены режущего инструмента в обрабатывающем центре (далее –
программная система).
Таблица 1
Примеры
3D-моделей
обрабатывающего центра из разработанной базы данных
|
Соотношение для оценки сложности
программной реализации структур данных 3D-моделей |
|
||
|
Примеры 3D-моделей из БД |
|
|
|

На первом этапе создания
программной системы разработана база данных 3D-моделей обрабатывающего центра в
форматах *.x_t и *.x_b (символьная и бинарная версии формата
ядра геометрического моделирования Parasolid), получены аналитические соотношения
для оценки сложности программной реализации их структур данных. Примеры 3D-моделей из разработанной базы данных
приведены в табл. 1.
В табл. 1 использованы
следующие обозначения: ![]() –
сложность программной реализации структур данных 3D-моделей в форматах *.x_t и *.x_b;
–
сложность программной реализации структур данных 3D-моделей в форматах *.x_t и *.x_b; ![]() – сложность программной
реализации структур данных сборок,
подсборок, деталей, граней, ребер, вершин и атрибутов (цвет, толщина линии,
прозрачность и т.д). Ниже приведены аналитические соотношения для оценки
сложности программной реализации структур данных основных геометрических
объектов в форматах *.x_t и
*.x_b.
– сложность программной
реализации структур данных сборок,
подсборок, деталей, граней, ребер, вершин и атрибутов (цвет, толщина линии,
прозрачность и т.д). Ниже приведены аналитические соотношения для оценки
сложности программной реализации структур данных основных геометрических
объектов в форматах *.x_t и
*.x_b.
где ![]() объемы памяти, необходимые для выполнения операций со
структурами данных геометрических объектов.
объемы памяти, необходимые для выполнения операций со
структурами данных геометрических объектов.
Параметрами структуры
данных вершины являются координаты точки в пространстве.
Параметры ребра зависят
от его типа. Рассмотрены четыре типа ребер: прямая, окружность, эллипс и B-сплайн. Параметрами прямой являются
точка и вектор в пространстве. Окружность и эллипс задаются центром, нормалью к
их плоскости, осью x,
принадлежащей плоскости окружности или эллипса, и радиусами. Параметрами
сплайновой кривой являются точки управления, узловые векторы и базисные
функции.
Параметры поверхности
также зависят от ее типа. Рассмотрены плоские, цилиндрические, конические,
сферические, тороидальные и B-сплайновые
поверхности. Параметрами плоскости являются точка в пространстве, нормаль к
плоскости и ось x,
принадлежащая плоскости. Цилиндрические и конические поверхности задаются
точкой на их оси вращения, единичным вектором, совпадающим с осью вращения,
радиусом основания и осью x,
принадлежащей плоскости основания. Для конуса дополнительно заданы параметры в
виде синуса и косинуса половины угла. Параметрами сферы и тора являются центры,
две перпендикулярные оси и радиусы. Параметрами поверхности на основе B-сплайнов являются точки управления,
узловые векторы и базисные функции для осей U, V [5].
Таблица 2
Формальное описание структур
данных 3D-моделей
типовых элементов конструкции
обрабатывающего
центра
|
Наименование
структуры данных |
Формальное
описание |
|
Сборка
|
struct
ASSEMBLY_s { int
highest_node_id; int
lowest_node_id; union
ASM_PARAM_GROUP_u
asm_parameters_groups; union
OPER_PARAM_GROUP_u oper_ parameters
_groups; union
SUB_ASSEMBLY_u *pSub_assembly; union
PARTS_u *pParts;}; typedef struct ASSEMBLY_s *pAssembly; |
Продолжение таблицы 2
|
Подсборка
|
struct
SUBASSEMBLY_s{ int
highest_node_id; int
lowest_node_id; union
ASM_PARAM_GROUP_u asm_ parameters_groups; union
OPER_PARAM_GROUP_u oper_ parameters_groups; struct
ASM_PARAM_s asm_ parameters; struct
OPER_PARAM_s oper_ parameters; union
SUB_ASSEMBLY_u *pSub_assembly; union
PARTS_u *pParts;}; typedef struct ASSEMBLY_s *pAssembly; |
|
Деталь
|
struct
PART_s{ struct
ASM_PARAM_s asm_ parameters; struct
OPER_PARAM_s oper_ parameters; struct
GEOMETRY_s part_geometry;}; typedef
struct PART_s *pPart; |


Сложность
программной реализации структур данных 3D-моделей сборок, подсборок и деталей вычисляется на основе формального
описания этих структур, которое приведено в табл. 2. Формальное описание
структуры данных основной сборки (сборки обрабатывающего центра) содержит
максимальный и минимальный идентификаторы составляющих элементов (highest_node_id и lowest_node_id), массивы
параметров сборки (asm_parameters_groups) для составляющих элементов и массивы
параметров движения (oper_
parameters _groups) для моделирования операций замены
режущего инструмента, массивы указателей на наименования составляющих элементов
(pSub_assembly и pParts). Формальное описание структур данных
подсборок содержит максимальный и
минимальный идентификаторы составляющих элементов (highest_node_id и lowest_node_id), массивы
параметров сборки (asm_parameters_groups) и массивы параметров движения (oper_ parameters _groups) для составляющих элементов, массивы параметров сборки (asm_parameters) и параметров движения (oper_ parameters) для включения в основную сборку,
массивы указателей на наименования составляющих элементов (pSub_assembly и pParts). Формальное описание структур данных
деталей содержит массивы параметров
сборки (asm_parameters), массивы параметров движения (oper_ parameters) для включения в подсборку или
основную сборку, описание геометрии детали (part_geometry).
а)
б)
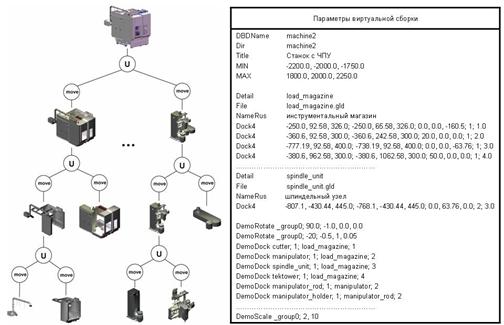
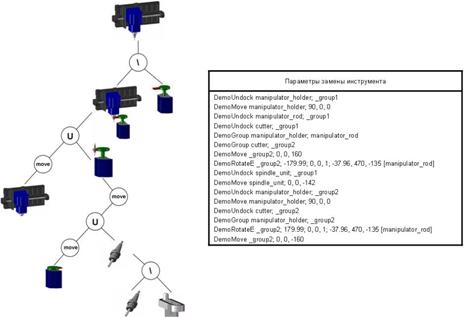
рис.1 Алгоритмы виртуальной сборки 3D-модели обрабатывающего центра (а) и 3D-моделирования операций замены
инструмента (б)
На втором этапе создания
программной системы разработаны алгоритмы виртуальной сборки (рис. 1а) и 3D-моделирования операций замены
инструмента (рис. 1б). Графические представления разработанных алгоритмов
приведены на рис. 1а и 1б слева в виде деревьев, вершинами которых являются
структуры данных 3D-моделей
[6], полученные в результате выполнения над ними операций аффинных
преобразований (move),
булевых операций объединения (U)
и разности (\). Ребра представляют собой качественные показатели реализации
вышеуказанных операций. На рис. 1а и 1б справа показаны реализации алгоритмов
на специально разработанном языке виртуальной реальности в формате *.dbd.
На третьем этапе, на
основе алгоритмов, представленных на рис. 1, выполнен синтез структуры
программной системы. Для этого, произведены операции со структурами алгоритмов,
которые заключаются в их декомпозиции на локальные алгоритмы (ЛА),
систематизации реализаций локальных алгоритмов в виде обобщенной сетевой модели
(ОСМ), содержащей множества локальных структур (ЛС), последовательном
объединении ЛА по определенным правилам с построением на каждом шаге
объединения новой ОСМ, соответствующей новому множеству возможных вариантов
реализации алгоритмов программной системы, сравнении полученных вариантов и
выборе наилучшего варианта при помощи поиска кратчайшего пути в ОСМ на основе
критериев сложности программной реализации структур данных 3D-моделей [4, 6].
рис. 2
Обобщенная сетевая модель структуры программной системы
ОСМ структуры
программной системы для 3D-моделирования
операций замены режущего инструмента в обрабатывающем центре приведена на рис.
2. Вершины ОСМ представляют собой структуры данных 3D-моделей, ребра – качественные
показатели реализации операций над структурами данных. Эллипсами обозначены
преобразователи структур данных; каждый эллипс представляет собой связный граф.
ОСМ включает множество
ЛС для реализации ЛА чтения/записи, построения и преобразования структур данных
3D-моделей в
формате .*x_t (в качестве примера, в ОСМ приведена
символьная версия формата), анализа и редактирования структур данных,
виртуальной сборки и 3D-моделирования
движения механизмов при замене режущего инструмента. Пунктирной линией
обозначен кратчайший путь в ОСМ, в соответствии с которым разработана
структурная схема программной системы.
рис. 3
Структурная схема программной системы
Структурная схема
программной системы представлена на рис. 3. Схема включает: базу данных 3D-моделей в форматах *.x_t и *.x_b (БД1); преобразователь Пр1 из
форматов *.x_t и *.x_b в формат блока АР; блок анализа и
редактирования структур данных 3D-моделей (АР); преобразователь в формат языка
моделирования виртуальной реальности VRML (Пр2); базу данных 3D-моделей в формате *.wrl (БД2); преобразователь во внутренний
формат программной системы *.gld (Пр3);
базу данных 3D-моделей,
представленных во внутреннем формате программной системы (БД3); подсистему
виртуальной реальности (ПВР), состоящую из универсального геометрического
процессора (УГП), блока специализированных вычислений (БСВ) и блока
интерактивной сборки (ИНСБ); блок интерактивного ввода (БИВ); базу данных
параметров сборки (БД ПС); базу данных параметров движения (БД ПД);
преобразователи в предтерминальные файлы (Пр 4.1…Пр 4.N) устройств вывода.
3D-модели, построенные в CAD-системах и преобразованные в форматы
ядра геометрического моделирования Parasolid (*.x_t, *.x_b), перемещаются в БД1. Далее
выполняется преобразование структур данных 3D-моделей в формат блока АР, где
выполняется поиск и исправление ошибок геометрии, образовавшихся в результате
выполнения операций построения и преобразования в CAD-системах. Преобразование структур
данных во внутренний формат программной системы *.gld из формата блока АР выполняется через
промежуточный формат *.wrl ввиду
наличия у авторов статьи готовых преобразователей Пр2 и Пр3. Преобразование во
внутренний формат программной системы выполняется однократно на начальных
операциях алгоритма виртуальной сборки. Поэтому, разработка специального
преобразователя из формата блока АР в формат *.gld является нецелесообразной в рамках
решаемой задачи 3D-моделирования.
После завершения
формирования БД3 выполняется виртуальная сборка обрабатывающего центра и 3D-моделирование операций замены
режущего инструмента при помощи подсистемы виртуальной реальности ПВР,
используя параметры из БД ПС
и БД ПД.
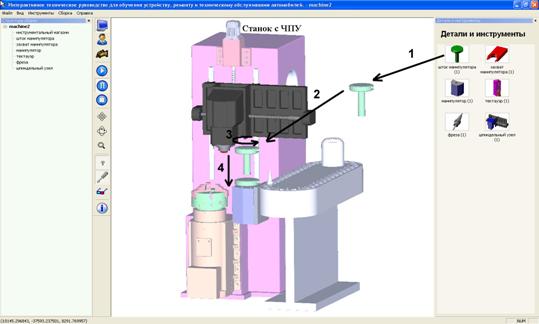
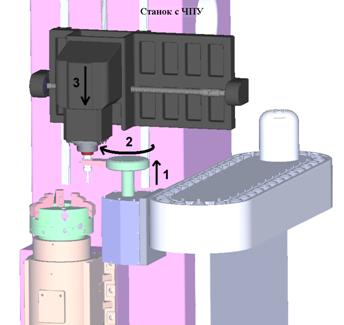
а)
б)
рис. 4 Интерфейс пользователя программной системы
при выполнении виртуальной сборки обрабатывающего центра (а) и 3D-моделировании операций замены режущего инструмента (б)
Рассмотрим работу
программной системы на примере автоматизированной виртуальной сборки
обрабатывающего центра и 3D-моделирования операций замены режущего инструмента.
На рис. 4а представлен процесс стыковки штока к манипулятору. Сначала модель
штока извлекается (стрелка 1) из БД3 в виртуальное пространство сборки изделия,
где уже расположена 3D-модель
частично собранного обрабатывающего центра. Затем шток перемещается к заранее выбранному
оператором месту стыковки (стрелка 2), причем система определяет маршрут
перемещения таким образом, чтобы шток не пересекался с другими моделями
виртуального пространства. Далее выполняется ориентация штока относительно
манипулятора (стрелка 3) с целью последующего совмещения захвата манипулятора с
позицией подачи инструмента в магазине. И, наконец, шток перемещается вдоль
посадочного отверстия до сопряжения с корпусом манипулятора (стрелка 4). На
рис. 4б представлен фрагмент процесса замены режущего инструмента. Шток с
захватом перемещается вверх, извлекая фрезу из магазина (стрелка 1), затем
поворачивается с целью последующего совмещения патрона шпиндельного узла с
фрезой (стрелка 2), а шпиндельный узел перемещается вниз с целью захвата фрезы.
Таким образом,
разработан метод создания программных систем виртуального 3D-моделирования автоматизированных
технологических операций для станков с ЧПУ. Получены аналитические соотношения
для оценки сложности программной реализации структур данных 3D-моделей в форматах ядра
геометрического моделирования Parasolid.
Построена обобщенная сетевая модель специализированной программной системы для
3D-моделирования
операций замены режущего инструмента в обрабатывающем центре, разработаны
алгоритмы системы и выполнен синтез структуры их программной реализации,
созданы программные средства.
Литература
1. Artamonov
E.I., Balabanov A.V., Romakin V.A.
Structured Design of Interactive Electronic Technical Manuals Based on
Virtual Reality Means / Preprints of the IFAC Conference on Manufacturing
Modelling, Management and Control (MIM ’2013). Saint-Petersburg: IFAC
Publication, 2013. P. 1114-1118.
2. Артамонов
Е.И., Ромакин В.А., Балабанов А.В. Операции на виртуальных моделях объектов
машиностроения // Материалы 36-й Междунар. конф. «Информационные технологии в
науке, образовании, телекоммуникации и бизнесе (IT+S&E*09)». – Открытое
образование, 2009. – С. 70-72.
3. Артамонов Е.И., Ромакин В.А.,
Балабанов А.В. Программные средства виртуальной настройки роботов //
Автоматизация в промышленности. 2010. № 5. С. 54-55.
4. Артамонов Е. И. Интерактивные
системы. Синтез структур – М.:
Инсвязьиздат, 2010. 210 с.
5. Роджерс Д., Адамс Дж. Математические
основы машинной графики. – М.:
Мир, 2001. 604 c.
6. Балабанов А. В.
Синтез структур специализированных интерактивных систем на основе объемных
геометрических моделей и средств виртуальной реальности //
Информационные технологии в проектировании и производстве. – 2013. №3. С.
23-29.