Практические аспекты
применения промышленных протоколов Ethernet при
построении распределённых
систем управления на базе
программно-реализованных контроллеров[1]
Р.А. Нежметдинов,
доц., к.т.н., neramil@ncsystems.ru,
А.Е. Сорокоумов,
аспир., artyom.sorokoumov@gmail.com,
МГТУ «СТАНКИН», г. Москва
В статье рассматриваются вопросы решения логической
задачи систем ЧПУ. Проводится сравнительный анализ контроллера электроавтоматики и программно-реализованного контроллера –
SoftPLC. Рассматривается вариант решения логической задачи на основе устройства предоставляющего удалённые
входы-выходы (баскаплер), а так же варианты
подключения оборудования к системе ЧПУ при помощи open-source
EtherCAT драйвера
CNC
logical task solution issues are considered. Programmable logical controllers
and software controller (SoftPLC) are compared. The
device with remote inputs and outputs (buscoupler) is
used for CNC logical task solution. The open-source EtherCAT
driver is used for devices' communication to CNC systems
Решение логической задачи
управления технологическим оборудованием в рамках общего ПО систем управления
без использования аппаратуры и системного программного обеспечения
Программируемых Логических Контроллеров (ПЛК) позволяет снизить стоимость
системы управления и получить ряд преимуществ, среди которых: добавление новых
функциональных возможностей и модернизация контроллера в короткие сроки;
создание кроссплатформенного приложения зависящего от
решаемой технологической задачи; возможность сокращения времени запуска в эксплуатацию
и др. [1]. Такой подход получил название программно-реализованный контроллер
или SoftPLC.
Современный уровень развития систем числового
программного управления позволяет применять для решения логической задачи
программно-реализованный логический контроллер (SoftPLC), в рамках общего программного обеспечения систем ЧПУ без привлечения
дополнительной аппаратуры и системного программного обеспечения программируемых
контроллеров, которые являются неотъемлемой частью практически любой современной
системы ЧПУ.
Наибольший эффект подобная идея дает в системах ЧПУ
типа PCNC, где программное обеспечение виртуального программно-реализованного
контроллера работает в одной операционной среде с программным обеспечением ЧПУ
[2].
Сравнительный анализ классического
ПЛК и SoftPLC представлен в таблице 1:
Сравнительный
анализ классического ПЛК и SoftPLC
|
Классический
PLC |
SoftPLC |
|
проектирование, построение
архитектуры и реализация логической задачи ЧПУ жестко заданы и зависят от
номенклатуры существующих на рынке ПЛК, возрастает
себестоимость системы ЧПУ |
нет необходимости в
дополнительном оборудовании, так как для вычисления используются ресурсы системы
ЧПУ, а значит, уменьшается себестоимость системы в целом |
|
программирование
классического внешне реализованного контроллера часто осуществляется вне
системы ЧПУ |
программирование SoftPLC можно осуществлять из системы ЧПУ |
|
в рамках такого построения
систем ЧПУ возникают дополнительные накладные расходы при передаче данных от
ПЛК к системе и обратно |
программно-реализованный
логический контроллер является программно-математическим обеспечением в рамках
системы ЧПУ, а значит, имеет возможность тесного взаимодействия как с
задачами ЧПУ, так и с модулями системы. Соответственно, обмен информацией и
получение данных осуществляется без дополнительных накладных расходов |
|
классический ПЛК является дополнительным
оборудованием в рамках системы ЧПУ, поэтому требует отдельной технической поддержки
и сопровождения |
SoftPLC не является
дополнительным оборудованием, техническая поддержка и сопровождение
осуществляется вместе с системой ЧПУ |
|
требуется наладка |
SoftPLC является программной реализацией,
следовательно, существует возможность быстрой модернизации системы без длительной
остановки и наладки оборудования за счет установки обновлений |
|
затруднена возможность
диагностики, установки обновлений через интернет |
при программной реализации
возникает возможность диагностики, установки обновлений и устранения ошибочных
ситуаций посредством удаленной работы через Internet |
В МГТУ «СТАНКИН» разрабатывается
программно-реализованный логический контроллер (SoftPLC), где в качестве базового протокола взаимодействия с устройствами
ввода/вывода выбран протокол EtherCAT [4]. При реализации
данного проекта использовался свободно распространяемый программный модуль
коммуникации с EtherCAT-устройствами с открытым
исходным кодом. Для взаимодействия модуля с системой управления был разработан
специализированный интерфейс, работа которого была проверена на реальном
оборудовании, для чего был собран экспериментальный стенд. В ходе проводимых
испытаний была подтверждена правильность архитектурного
решения, выбранного при проектировании системы управления.
Для передачи управляющих воздействий к
исполнительным устройствам системе ЧПУ требуются входы/выходы, которые
предоставляет пассивный модуль - баскаплер (buscoupler). Это устройство, в
состав которого входят дискретные и аналоговые модули ввода/вывода, модули для
подключения датчиков, задающих и исполнительных устройств, работающие по
различным интерфейсам цифровым и аналоговым интерфейсам (SSI, SinCos, Incremental Encoder Interface), коммуникационные
модули (RS-232, RS422/RS-485, PROFINET IO, EtherCAT Bridge,
и др.), а так же базовый интерфейсный модуль для подключения баскаплера к полевой шине. Базовый модуль выполняет роль транслятора управляющих сигналов, и в отличие
от ПЛК не имеет в своём составе мощного микроконтроллера для выполнения задач
управления. Эти задачи решаются на программном уровне в системе управления, при
помощи SoftPLC.
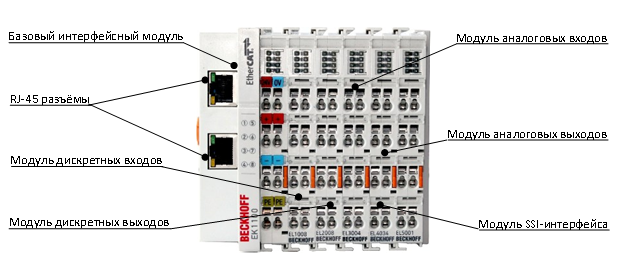
рис. 1. Баскаплер
Beckhoff EK1100 c
дополнительными модулями расширения
Баскаплер Beckhoff EK1100 (рис. 1) имеет
возможность подключения к сети EtherCAT, основанной на технологии Industrial Ethernet. В такой сети могут одновременно работать баскаплеры, контроллеры, приводы главного движения и подач за
счёт единого интерфейса коммуникации [5].
Для обеспечения независимости системы ЧПУ от
конкретного производителя и для уменьшения её стоимости предлагается
использовать решение, основанное на применении стандартной Ethernet-карты
вместе с EtherCAT-драйвером операционной
системы.
Существует несколько open-source
решений, среди которых можно выделить наиболее популярные: проект «Etherlab», разработанный группой инженеров из Германии
[6], и проект под названием Simple Open EtherCAT Master
(SOEM) [7].
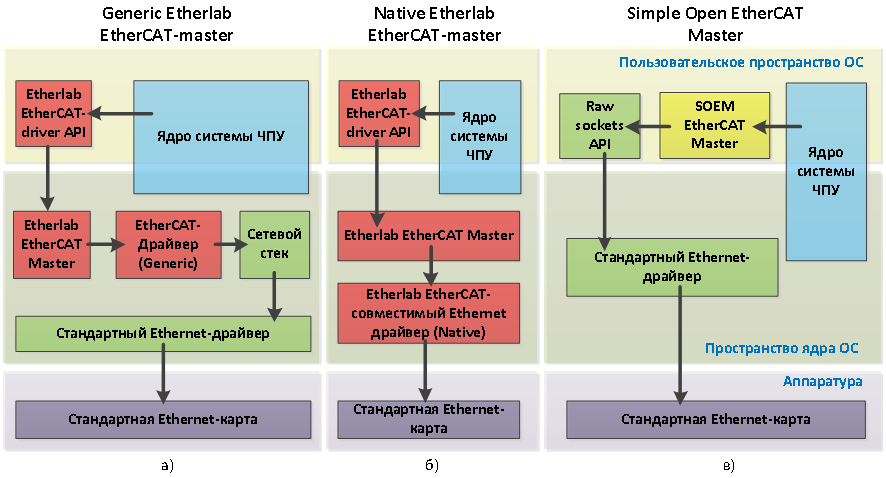
рис. 2. Архитектура модуля
управления устройствами EtherCAT
На рисунке 2 представлены три варианта архитектур
модуля управления EtherCAT-устройствами,
предлагаемого для встраивания в систему числового программного управления. Два
варианта основываются на применении решений разработчиков Etherlab (рис. 2 а, б), предлагающих использовать в
качестве мастер-устройства EtherCAT программный драйвер,
который позволяет осуществлять управление оборудованием посредством систем
управления, построенных на базе персонального компьютера с использованием
обыкновенной сетевой карты. Исходные коды драйвера предоставлены в открытом
доступе на сайте проекта. При компиляции можно выбрать один из двух вариантов
построения драйвера. В первом случае это может быть так называемый «Native»
драйвер (рис. 2-б), обеспечивающий возможность управления оборудованием в
режиме реального времени, достигаемой за счёт замены стандартного драйвера
сетевой карты на EtherCAT-совместимый Ethernet-драйвер,
реализующий механизм передачи пакетов с данными «в обход» сетевого стека
операционной системы. К недостаткам такого решения можно отнести ограниченную
применяемость такого драйвера – он может работать только с сетевыми картами,
построенными на базе определенного типа микроконтроллеров (Realtek 8139). Другим вариантом построения драйвера
является так называемый Generic-EtherCAT-драйвер (рис. 2-а). Такое решение позволяет осуществлять управление в
связке «Generic–драйвер – сетевой стек – стандартный Ethernet
драйвер сетевой карты». Этот вариант позволяет применять любую сетевую карту в
качестве устройства доставки управляющих EtherCAT-телеграмм технологическому оборудованию, но за счёт использования
медленного для RT-задач (real-time) сетевого стека операционной
системы становится невозможным применение в задачах, требующих выполнения в
реальном времени. Модуль, реализующий логику работы EtherCAT-master находится на
уровне ядра операционной системы, доступ к нему осуществляется либо из пространства
ядра ОС, либо через программный интерфейс (API драйвера) из
пользовательского пространства. Существенным недостатком двух указанных способов
является возможность применения драйвера только вместе со специализированной
версией ядра операционной системы Linux, являющейся морально
устаревшей.
Третий вариант управления EtherCAT-устройствами базируется на технологии Simple Open EtherCAT Master,
основанной на применении «сырых сокетов» (raw sockets), которые позволяют собирать TCP/IP-пакеты на уровне
пользовательского пространства операционной системы посредством прикладного
программного интерфейса (API), контролируя каждый бит
заголовка и отправляя в сеть нестандартные пакеты.
В качестве примера практической реализации
применения протокола EtherCAT служит аппаратная
архитектура системы ЧПУ, представленная на рисунке 3. К ядру системы управления
посредством стандартной Ethernet карты осуществляется подключение
баскаплера, работающего по протоколу EtherCAT, к входам и выходам которого подключена револьверная
головка для смены инструмента.

Литература
1. Шемелин В.К., Нежметдинов
Р.А. Применение технологии клиент-сервер при проектировании контроллера типа SoftPLC для решения логической задачи в рамках систем ЧПУ
// Автоматизация и современные технологии. – 2010. № 3. с. 31-37.
2. Сосонкин В.Л., Мартинов Г.М.
Системы числового программного управления: Учеб. пособие. – М.: Логос, 2005. – 296 с.
3. Нежметдинов Р.А. Повышение
эффективности функционирования электроавтоматики
станков с ЧПУ на основе реализации регулярных моделей архитектуры программно-реализованных
контроллеров типа SoftPLC: Автореф.
дисс. канд. техн. наук. М.,
2009.
4.
Мартинов Г.М., Любимов А.Б., Бондаренко А.И., Сорокоумов А.Е., Ковалев
И.А. Подход к построению мультипротокольной системы
ЧПУ // Автоматизация в промышленности. - 2012. №
5. - с. 8-11.
5.
EK1100 EtherCAT
Coupler - http://www.beckhoff.ru/
6.
An Open Source Toolkit for
rapid real time code generation under Linux® using Simulink/RTW®
- and EtherCAT®-Technology. -
http://etherlab.org/en/index.php
7.
Simple Open EtherCAT Master - http://soem.berlios.de/