Решение задачи синтеза закона управления системой
«двигатель-генератор» в системе «ГАММА-3»
Т.М.
Брагин,
аспир.,
А.М. Степанов,
аспир.,
М.Ф. Степанов,
д.т.н., mfs@sstu.ru
СГТУ, г. Саратов
Рассматриваются вопросы
применения многофункциональной системы ГАММА-3 для решения задачи
синтеза закона управления сложным объектом. В качестве исследуемого
объекта выступает двигатель внутреннего сгорания, соединенный гибкой муфтой с
электрическим генератором. Проведен сравнительный анализ статического и
астатического законов управления. С целью сокращения затрат времени применяются
параллельные вычисления на базе MPI.
Questions of application of the multifunctional
system GAMMA-3 for solution of the task of synthesis of the law of control by
the complex plant are considered. The researched plant is the engine of
internal combustion was connected with the electrical
generator by floppy joint. The comparative analysis of static and astatic laws of control is carried out.
With the purpose of abbreviation of expenses of time, parallel computations on
base MPI are applied.
Проектирование и исследование систем
автоматического управления становится все более сложным видом деятельности. Это
обусловлено возрастающей сложностью объектов управления, ужесточением
требований к точности и качеству процесса управления, продолжающимся развитием
собственно теории автоматического управления, методы которой становятся все
более утонченными и сложными с вычислительной точки зрения. Как следствие, без
использования средств автоматизации решения задач, проектировщику систем
управления не обойтись. Однако многочисленные работы, ведущиеся в этом
направлении, до сих пор не привели к созданию достаточно мощного, удобного и
доступного инструментария. Одним из наиболее перспективных путей развития средств автоматизации решения задач теории управления
является применение концепции облачных вычислений. Ее применение позволит
концентрировать усилия на развитии функциональных возможностей, но и снизить
стоимость владения и использования конечными пользователями – проектировщиками.
Возможно, пионером в области применения облачных технологий для автоматизации
проектирования систем управления является многофункциональная система ГАММА-3
[1-3].
В данной работе рассматривается решение задачи синтеза закона управления силовой установкой
тепловоза 2ТЭ116. С учетом конструктивных особенностей системы
«двигатель-генератор» была разработана структура математической модели. На
основе экспериментальных данных, полученных во время стендовых испытаний на
резистивную нагрузку, решена задача параметрической идентификации [4]. Полученные
значения параметров математической модели далее использовались для решения
задач синтеза и анализа системы управления.
Рассмотрим полученные результаты.
1. Синтез статического закона управления системой
«двигатель-генератор»
Решение задачи осуществлялось в системе ГАММА-3.
Построенная в [4] математическая модель системы «двигатель-генератор» записана
в отклонениях от номинальных значений переменных и представляется в форме Коши
в матричной форме записи:
|
|
(8) |
где ![]() – вектор переменных
состояния объекта;
– вектор переменных
состояния объекта; ![]() – вектор измеряемых
переменных объекта;
– вектор измеряемых
переменных объекта; ![]() – относительное изменение
угла поворота коленчатого вала двигателя;
– относительное изменение
угла поворота коленчатого вала двигателя; ![]() – относительная
угловая скорость коленчатого вала двигателя;
– относительная
угловая скорость коленчатого вала двигателя; ![]() – относительная
угловая скорость ротора турбокомпрессора;
– относительная
угловая скорость ротора турбокомпрессора; ![]() – относительное изменение
угла поворота ротора генератора;
– относительное изменение
угла поворота ротора генератора; ![]() – относительная
угловая скорость ротора генератора;
– относительная
угловая скорость ротора генератора; ![]() – относительное изменение
напряжения на выходе генератора;
– относительное изменение
напряжения на выходе генератора; ![]() – относительное
давление газа в выпускном коллекторе;
– относительное
давление газа в выпускном коллекторе; ![]() – относительное
изменение давления наддува;
– относительное
изменение давления наддува; ![]() – относительное изменение перемещения рейки топливного насоса
(управление);
– относительное изменение перемещения рейки топливного насоса
(управление); ![]() – относительное
изменение нагрузки (внешнее возмущение).
– относительное
изменение нагрузки (внешнее возмущение).
Требования к точности управления задаются в виде ![]() , где
, где ![]() – выходная переменная
объекта, по которой задаются требования
– выходная переменная
объекта, по которой задаются требования ![]() .
.


а)
б)
рис.
1 Реакция на скачкообразное (а) и
гармоническое (б) внешнее воздействие при полных измерениях

а)
б)
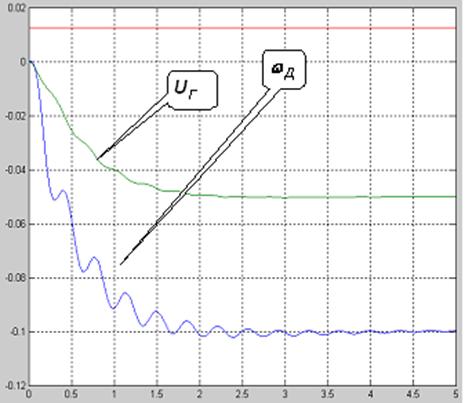
рис. 2 Реакция на скачкообразное (а) и гармоническое
(б) внешнее воздействие с использованием фильтра Калмана
Анализ полученных результатов показывает (рис. 1,
2), что при полных измерениях желаемая точность управления (<5%) успешно
достигается. Однако измерению доступен не полный вектор состояния. Здесь
результаты не столь привлекательные. Если отклонение
напряжения на выходе генератора от номинального в пределах 5%, то отклонение
скорости вращения вала двигателя от номинальной достигает 10%. Одной из причин
является наличие в системе упругой муфты, что приводит к возникновению
пульсаций, наиболее ясно просматриваемых при анализе реакции на скачкообразное
внешнее воздействие (изменение нагрузки).
Для компенсации выявленных недостатков далее
применим астатический закон управления.
2. Синтез астатического закона управления системой
двигатель-генератор
Процедура построения астатического регулятора
включает:
1) формирование расширенной
модели объекта управления за счет дополнительного дифференциального уравнения
для получения интеграла управляемой переменной состояния объекта;
2) синтез закона управления
для расширенной модели объекта управления;
3) формирование закона
управления для исходного объекта с учетом дополнительного интегратора,
включаемого в закон управления;
4) построение наблюдателя для
расширенного объекта с учетом доступности для изменения переменной состояния,
являющейся выходом дополнительного интегратора.
Результаты моделирования системы с астатическим
законом управления приведены на рис. 3, 4.
Анализ полученных
результатов позволяет сделать заключение о том, что астатический закон
управления с использованием фильтра Калмана
обеспечивает нулевую статическую ошибку и динамическую ошибку в пределах
допустимых значений (по отклонению от номинального значения напряжения на
выходе генератора – 1,5%, по отклонению от номинального значения частоты
вращения вала двигателя – 3%).


а)
б)
рис.
3 Реакция на скачкообразное (а) и
гармоническое (б) внешнее воздействие при полных измерениях


а)
б)
рис. 4 Реакция на скачкообразное (а) и гармоническое
(б) внешнее воздействие с использованием фильтра Калмана
Приведённые результаты были получены в
многофункциональной системе ГАММА-3. Для проведения исследований были
разработаны программные модули, реализующие операции языка ГАММА для построения
закона управления на основе линейно квадратичной оптимизации (lqr), моделирования динамики (lsim) и построения фильтра Калмана
(Kalman). Особенностью указанных модулей
является их использование на сервере приложений системы ГАММА-3 и возможность
применения параллельных вычислений на базе MPI при наличии технической возможности, предоставляемой
аппаратными ресурсами сервера приложений.
Работа выполнена при финансовой поддержке РФФИ
(грант 09-07-00200-а).
Литература
1.
Александров А.Г. Система ГАММА-3 и ее применение / А.Г.Александров,
Л.С.Михайлова, М.Ф.Степанов // Автоматика и телемеханика, 2011, № 10. С. 19-27.
2.
Александров А.Г. О развитии концепции автоматического
решения задач теории управления в системе ГАММА-3 / А.Г.Александров,
Л.С.Михайлова, М.Ф.Степанов, Т.М.Брагин, А.М.Степанов // Мехатроника,
автоматизация, управление. 2011. № 9.
3.
Александров А.Г. Организация структуры технических
и программных средств распределённой интегрированной среды ГАММА для проектирования
систем управления / А.Г.Александров, Л.С.Михайлова, М.Ф.Степанов // Системы
проектирования, технологической подготовки производства и управления этапами
жизненного цикла промышленного продукта (CAD/CAM/PDM-2011). Труды 10-й Международной
конференции. Под ред. Е.И.Артамонова.- М.: Ин-т
проблем управления им. В.А.Трапезникова РАН. – 2011.
4.
Степанов А.М. Решение задачи параметрической идентификации модели
системы двигатель-генератор генетическим алгоритмом в системе «ГАММА-3»
с использованием параллельных вычислений / А.М.Степанов, Т.М.Брагин,
М.Ф.Степанов // Наст. сб.