Диагностика
коммуникационной связи в распределённых системах управления
технологическим
оборудованием с ЧПУ
А.У. Кулиев
аспирант, abay_k@list.ru
Р.А. Нежметдинов
к.т.н., доц. neramil@gmail.com
ФГБОУ ВПО МГТУ «СТАНКИН», г. Москва
Предложена архитектура распределенной системы
управления крупногабаритными станками. Проиллюстрирован практический подход к
решению задачи управления электроавтоматикой станка в режиме «master-slave».
Предложен способ диагностики коммуникационного канала между распределенными
вычислительными устройствами[1].
Architecture of
a system for
distributed control
of maxi-shuttle
machines was proposed.
A practical approach to solve the problem of control a
machine magnetics in a «master-slave» mode was illustrated. A technique for
diagnostic of communication channel between distributed calculating devices was
proposed.
Введение
Целому ряду стратегических отраслей, таких
как судостроение, тяжелое машиностроение, оборонно-промышленный комплекс и
многих других, свойственна необходимость в габаритных деталях. Комплексная
многооперационная обработка таких деталей в условиях крупносерийного и
массового производства требует применения тяжелых станков и автоматических
линий, оснащенных системами ЧПУ. В данной работе рассмотрены варианты
реализации управления станками с числовым программным управлением, в которых
используется большое количество дополнительного технологического оборудования
для выполнения основных и вспомогательных операций обработки.
В
состав системы ЧПУ (рис. 1) входят
ядро системы управления, терминал оператора c USB-клавиатурой, станочная панель
управления, контроллеры приводов подач и контроллер электроавтоматики станка.

рис. 1 Архитектура системы числового управления
Аппаратное
обеспечение состоит из стандартной PC- и специализированной NC-аппаратуры. Платформонезависимая
реализация ядра дает возможность не привязываться к конкретному программному
обеспечению, поэтому может использоваться любая операционная система реального
времени (например, Linux
или Widows с
расширением RTX)
[1].
Терминальный
компьютер со столбцом машинных (M-keys)
и рядом функциональных (F-keys) клавиш предназначен для организации
пользовательского интерфейса и предоставляет оператору возможность выбора
режима управления, работы с управляющими программами (УП), быстрого вызова
команд электроавтоматики станка и визуализации состояния подконтрольных
объектов.
Логическая
задача управления
Логическая
задача управления решается путем организации сети, состоящей из программируемых
логических контроллеров, непосредственно управляющих технологическим процессом.
Обмен данными в сети между вычислительными устройствами осуществляется по
коммуникационному протоколу ModBus с применением на физическом уровне стандарта
последовательной линии связи RS-485. Применение стандартного протокола обеспечивает
стабильную работу системы управления в производственных условиях [2].
Взаимодействие
автономных программируемых контроллеров электроавтоматики станка строится с использованием
принципа «Ведущий – Ведомый» («Master - Slave») с образованием многоранговой
сети (рис. 2). [3]
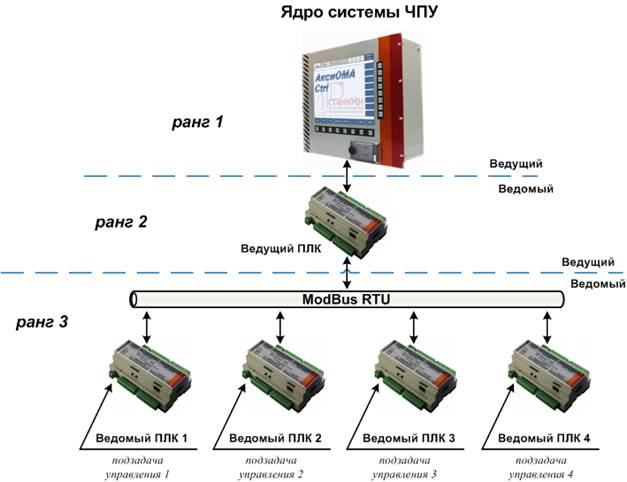
рис. 2 Организация управления в режиме «master-slave»
Первым
по рангу является ядро системы ЧПУ, управляющее комплексным процессом обработки.
Устройство второго ранга – «ведущий» ПЛК, который организует согласованную
работу всех элементов, входящих в состав системы управления электроавтоматикой.
К устройствам третьего ранга относятся «ведомые» ПЛК, каждый из которых
реализует собственную подзадачу управления (контроль над группой однородных
элементов).
Непосредственная
коммуникация осуществляется только между смежными уровнями (соответственно,
1-2, 2-3 и 3-4). Механизм взаимодействия базируется на использовании
разделяемой памяти (применяется внутренняя память подчиненных контроллеров),
доступной для чтения и записи данных как «ведущему», так и «ведомому»
устройствам.
Применение
распределенного управления позволяет автономно вести разработку программного
обеспечения для каждого отдельного программируемого контроллера с последующей
интеграцией в систему и вводом оборудования в эксплуатацию. Но при этом
актуальной предстает задача диагностики «жизнедеятельности» всей системы в
целом, так как выход из строя хотя бы одного устройства не позволяет ей
правильно комплексно функционировать.
Среда
разработки прикладного ПО для ПЛК предлагает использовать для обмена данными
типа «bool»
и «int» стандартные
элементы синтаксиса. Параметр «Error» блоков для чтения/запроса данных
удаленного устройства уведомляет нас об
отсутствии связи с устройством. Но уведомление производится однократно. При
восстановлении нарушенной коммуникации параметр автоматически не обновляется,
что является недостатком при использовании базового функционала.
Таким
образом, непрерывная диагностика коммуникационной связи требует разработки
специального программного модуля. Для его реализации достаточно использования
одного из типов таймера, генерирующего импульсы с заданными параметрами: длительностью
самого импульса и паузы между соседними импульсами. Выбор обусловлен
ограниченностью набора предоставляемых средой разработки функций и
относительной простотой исполнения требуемого программного кода. Суть механизма
заключается в циклической передаче последовательности 0 (пауза) и 1 (импульс)
от ведущего ПЛК к каждому из ведомых и от каждого ведомого ПЛК к ведущему.
Подобная двунаправленная передача данных позволяет проводить проверку связи
обоими устройствами и действовать согласно заложенным алгоритмам.
Если
данные попеременно сменяются с 0 на 1 и обратно в течение всего времени работы
ПЛК, то устройство продолжает работать в штатном режиме, проводя обслуживание
технологического оборудования (рис. 3, Status Bar 1). Если значение входящих данных не
изменяется во времени (время уставки выбирается пользователем, например, 100 миллисекунд),
то и «ведомый», и «ведущий» контроллеры «понимают», что связь между ними прервана
(рис. 3,
Status Bar 2).
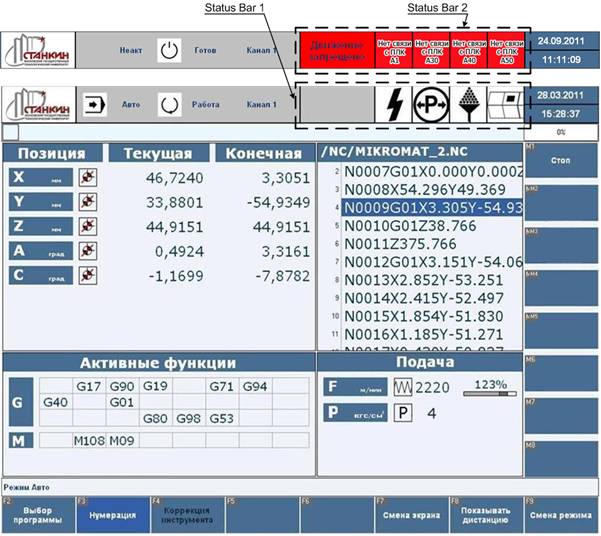
рис. 3 Пользовательский интерфейс системы ЧПУ
При
этом первый приостанавливает работу активных объектов управления (переходя в
безопасный режим), а второй «сообщает» ядру системы управления о
недееспособности системы ввиду сбоя или повреждения коммуникационного канала.
Система ЧПУ также должна приостановить процесс обработки, так как в отличие от
классической распределенной системы управления, выход из строя хотя бы одного
вычислительного устройства означает невозможность выполнения им своей подзадачи
управления в полном объеме. Следствием такого ограниченного функционирования может
явиться брак при обработке деталей.
Заключение
В
работе рассмотрена архитектура системы ЧПУ «AxiOMA Ctrl» и предложен вариант
реализации управления электроавтоматикой станочного оборудования по принципу
«Master – Slave». Ввод в ее состав «ведущего» ПЛК предъявляет повышенные
требования к надежности его функционирования. Однако наличие «мастер» ‒
контроллера позволяет передать ему функции диспетчеризации, тем самым
освобождая программное обеспечение ядра системы ЧПУ от реализации
специализированного функционала. Разработка программного модуля диагностики
связи между устройствами позволяет контролировать целостность коммуникационных
каналов, а при необходимости сократить время поиска неисправности во время
пусконаладочных и эксплуатационных работ.
Литература
1.
Григорьев
С.Н., Мартинов Г.М. Концепция построения базовой системы числового программного
управления мехатронными объектами // Информационные технологии в проектировании
и производстве, 2011. №2, с.21-27.
2.
Сосонкин
В.Л., Мартинов Г.М. Системы числового программного управления: Учеб. пособие. –
М. Логос, 2005. – 296 с. ISBN
5-98704-012-4.
3.
Мартинов
Г.М., Козак Н.В., Нежметдинов Р.А., Пушков Р.Л. Принцип построения
распределенной системы ЧПУ с открытой модульной архитектурой // Вестник МГТУ
"Станкин", 2010. №4(12). С. 116-122.