Технология формирования динамических моделей Matlab
механических узлов, конструкций и
приспособлений для их испытаний из 3D-моделей САПР SolidWorks
В.М. Понятский,
нач. сектора, к.т.н, доц.,
В.Г. Федорищева,
вед. инж., kbkedr@tula.net,
ГУП «КБП», г.Тула
В настоящее время современные
информационные технологии открывают новые возможности при проектировании
перспективных технических систем. В работе рассматриваются возможности
использования трансляции 3D-модели механизмов САПР SolidWorks в среду динамического
моделирования Matlab при проектировании сложных конструкций механизмов.
В настоящее время одним из
популярных пакетов для разработки конструкторских проектов является САПР
SolidWorks. SolidWorks обеспечивает высокую эффективность и качество разработки
твердотельных моделей деталей и узлов, их параметризацию и высокую точность
определения механических параметров.
Пакет MATLAB расширяет
возможности САПР SolidWorks в части динамического моделирования 3D-моделей механизмов.
Графическая среда имитационного моделирования Simulink позволяет объединять
элементы различной физической. Пакет расширения Simulink SimMechanics позволяет
моделировать механизмы, состоящие из множества твердых тел и их компонентов –
соединений, ограничителей движения, управляющих элементов и датчиков движения.
Входящий в состав пакета SimMechanics CAD-транслятор позволяет генерировать
модели механических систем из их сборок в SolidWorks. После установки транслятор
внедряется в среду SolidWorks и позволяет переносить сборки механических систем
в Simulink. Транслятор SimMechanics преобразует геометрию сборок SolidWorks в модели
блок-схем Simulink. При этом все механические параметры твердотельной модели,
определяющие её динамику (масса, инерционные характеристики, координаты центров
масс, параметры соединений и др.) передаются динамической модели. SimMechanics
автоматически формирует систему дифференциальных уравнений движения механизма
(она является внутренним объектом, скрытым от пользователя).
Процесс создания
математической модели системы управления в Simulink из 3D-модели элементов в
SolidWorks состоит из нескольких этапов: экспорт 3D-модели SolidWorks в
xml-файл, импорт xml-файла в среду
Simulink, анализ динамики системы управления, выбор закона управления и
исполнительного элемента в среде Simulink. На рисунке 1 приведена обобщенная
схема этого процесса.
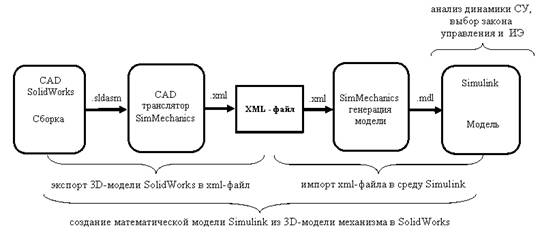
рис. 1 Обобщённая схема процесса проектирования
Проведено исследование
функционирования кулачкового механизма, включающего шаговый двигатель с кулачок
на его валу и рычагом с линзой. Вращение шагового двигателя вызывает дискретное
перемещение кулачка. Подпружиненный рычаг перемещается по профилю кулачка.
Поворот линзы приводит к изменению угла преломления луча. Необходимо обеспечить
минимальные колебания кулачка, возникающие при дискретных поворотах вала двигателя.
Проведена трансляция
3D-модели механизма САПР SolidWorks (рис. 2) в среду динамического моделирования
Matlab.
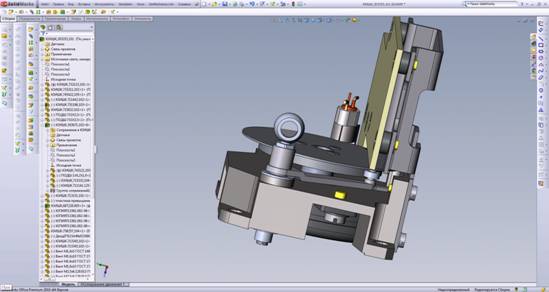
рис. 2
3D-модель механизма в SolidWorks
Осуществлены доработки
динамической модели механизма в среде Matlab (рис. 3), обеспечивающие дискретное
изменение вращающего момента на валу шагового двигателя, прижатие рычага к
кулачку и перемещение рычага по профилю кулачка.
Моделирование вращающего
момента на валу шагового двигателя осуществляется с помощью угловой пружины,
подключенной к соединению между шаговым двигателем и кулачком. Величина
вращающего момента определяется по формуле:
М = – Сx (φt – φо) – bω, (1)
где
Сx – угловая жесткость пружины; (φt – φо) – относительное изменение
углового положения пружины; φt – текущее угловое положение вала двигателя;
b – коэффициент демпфирования пружины; ω – угловая скорость оси вала
двигателя. Дискретный вращающий момент формируется за счет дискретного изменения
угла φо. Величина угловой жесткости пружины определена исходя из
паспортных данных шагового двигателя.
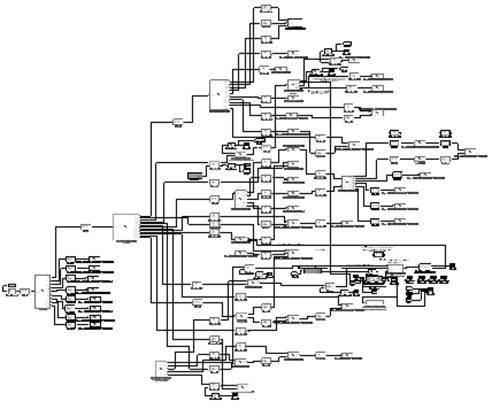
рис. 3 Модель кулачкового механизма вращения в
Simulink
Для моделирования
взаимодействия между рычага и кулачком подключены две пружины, обеспечивающие
прижатие рычага и формирование профиля кулачка.
При трансляции телам модели
Simulink передаются соответствующие массо-инерционные характеристики компонентов
сборки SolidWorks. Для обеспечения визуализации
модели Simulink геометрия элементов сборки SolidWorks
передается с помощью транслируемых stl-файлов (рис. 4).
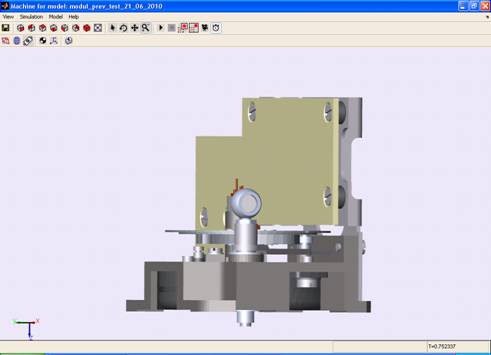
рис. 4
Визуализация механизма превышения в Simulink с помощью stl-файлов
В соответствии с полученной
моделью кулачкового механизма вращения в среде Matlab проведено исследование
его динамики функционирования (рис. 5).
Анализ полученных результатов
показывает, что при увеличении момента на валу двигателя или коэффициента
демпфирования возрастает частота и уменьшается величина колебательной
составляющей, а при уменьшении момента на валу двигателя или коэффициента
демпфирования уменьшается частота и увеличивается величина колебательной составляющей.
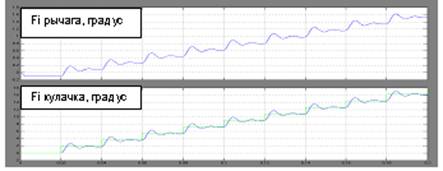
рис. 5 Результат моделирования работы кулачкового механизма
при отработке дискретного вращающего
момента: М=0,015 нм (Cx=0.008 нм/гр), b=0.000005
нмс/гр
Рассмотрен механизм,
закрепленный в приспособлении для его испытаний. Необходимо разработать динамическую
модель, обеспечивающую воспроизведение передачи вибрационных колебаний от приспособления
к испытуемому механизму.
Проведена трансляция
3D-модели сборки исследуемого механизма и приспособления (рисунок 6) САПР
SolidWorks в среду динамического моделирования Matlab (рисунок 7).
Приспособление представлено в виде раскрывающихся подсборок. При преобразовании
телам модели Simulink передаются соответствующие массо-инерционные
характеристики деталей сборки SolidWorks и не передаются их упругие свойства.
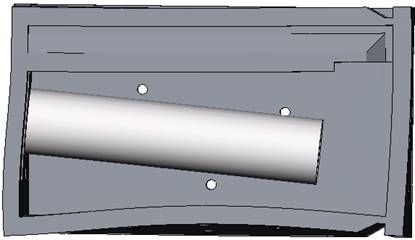
рис. 6 Механизм в сборке с приспособлением для
вибрационных испытаний в SolidWorks:
а) исходная 3D-модель; б) 3D-модель
при нагрузке

рис. 7 Модель механизма с приспособлением для вибрационных
испытаний в Simulink
с раскрывающимися подсборками
Осуществлены доработки
динамической модели приспособления в среде Matlab, обеспечивающие упругие колебания
его деталей и задание постоянной вибрационной нагрузки.
Моделирование упругих свойств
деталей приспособления обеспечено соответствующим их представлением в виде двух
тел, соединенных с помощью угловой пружины. Величина упругого момента определяется
по формуле:
М = - Сx (φt – φо) – bω, (2)
где
Сx – угловая жесткость пружины; (φt – φо) – относительное изменение
углового положения пружины; φt, φо – текущее и исходное угловое
положение соединенных тел; b – коэффициент демпфирования пружины; ω –
угловая скорость взаимного перемещения двух тел. Величины угловых жесткостей
деталей определены по 3D-модели приспособления в САПР SolidWorks.
При задании вибрационных
нагрузок моделировалась работа системы регулирования, обеспечивающая постоянство
нагрузки в месте её приложения к приспособлению.
В соответствии с полученной
динамической моделью в среде Matlab проведено исследование возникающих резонансных
частот в рассмотренной конструкции механизма и приспособления для его испытаний.
Литература
1.
Понятский В.М.,
Колесников Г.И., Федорищева В.Г. Проектирование систем управления с CAD/CAE
элементами SolidWorks в среде имитационного моделирования MATLAB // Доклады
Российской конференции с международным участием «Технические и программные средства
систем управления, контроля и измерения»
(УКИ’08). 10 - 12 ноября