Система регистрации лидарных сигналов с широким
динамическим диапазоном
Н.Г. Анисимова,
с.н.с., к.т.н,
Н.Г. Журавлёва,
н.с.,
Ю.С. Легович,
зав. лаб., к.т.н.,
ИПУ РАН, zhurav@ipu.ru, г. Москва
Аннотация
Развитию дистанционных методов контроля загрязнения
атмосферного воздуха с использованием
лазерных локаторов (лидаров) в первую очередь препятствует низкая точность
измерений отраженного сигнала на входе телескопической приемной антенны. В
настоящей работе приводятся сведения о разработанной системе высокоточных
измерений, обеспечивающей полную регистрацию сигнала обратного рассеяния во
всем динамическом диапазоне его
изменения. Данная система обеспечивает
автоматическую регистрацию сигнала в
диапазоне 145 дБ (что соответствует 24 двоичным разрядам) с точностью 0.1% и
его оперативную обработку, позволяет повысить эффективность известных методов
интерпретации измерений и расширить возможности оптических методов в
исследовании атмосферы для решения ряда научных и прикладных задач.
Рост городов, производств, транспорта и
возникновение проблем экологии и сохранения жизнеспособного пространства требуют
развития дистанционных методов контроля загрязнения атмосферного воздуха. С
развитием методов лазерной локации, казалось бы, можно проводить измерения
плотности атмосферы в любом месте, в любое время, контролировать дымы, туманы,
смоги, делать “дыры” в атмосфере и добираться до озонового слоя, который постоянно уменьшается,
узнавать толщину “шапки” из углекислого газа над городом и т.п. Однако скоро стало понятно, что самая интересная
информация утопает в неопределенностях, связанных с ограниченностью в точности
измерений отраженного сигнала на входе телескопической приемной антенны, с
несовершенством преобразования аналогового сигнала в цифровую форму, с некорректностью интерпретации оптических характеристик
атмосферы при оценке состава и метеорологических параметров. Все эти маленькие
“но” привели к тому, что дистанционные методы оказались не конкурентно способными
для использования в задачах атмосферного мониторинга и правоохранительные
органы склонны отдавать предпочтение методам “in situ” для определения штрафных
санкций предприятиям-загрязнителям.
Несмотря на
все недостатки методов лазерного зондирования атмосферы решающим фактором их
применения для решения задач
определения загрязненности атмосферы,
является мобильность и возможность проведения оперативного контроля
выбросов промышленных предприятий. Успехи, достигнутые в последнее время в
развитии сигнальных процессоров DSP (Digital Signal Procesor) и аналоговых
средств обработки сигнала с высокими техническими характеристиками [1], открывают
новые возможности в автоматизации лазерных исследований аэрозольных загрязнений
атмосферы. Этому способствует плачевное состояние существующих отечественных
систем контроля: “разработанные в 1992 году станции контроля атмосферного
воздуха в 1995 году частично вышли из строя и морально устарела аппаратура
автоматических станций (электронные блоки сбора и обработки информации)” [2].
Функциональная
схема лидара
Функциональная
схема лазерного локатора (лидара) за последние годы мало претерпела изменений
[3]. Основные усилия разработчиков были направлены на повышение надежности
технических средств и снижения их стоимости с целью перевода лидаров из статуса
научного оборудования в средство измерения для систем мониторинга
загрязненности атмосферы. Блок схема
типового лидара приведена на рисунке 1. Основной частью комплекса является
приемо-передающая система, включающая выходной телескоп (2) и импульсный лазер(3), формирующие выходное
излучение с малой расходимостью луча (1). Прием рассеянного атмосферой сигнала
(4) осуществляется приемным телескопом
(5), оснащенным фотоэлектронным
преобразователем (6).
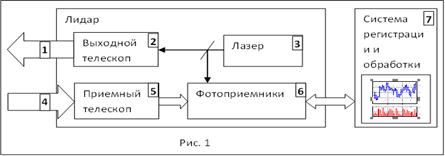
Система регистрации и оперативной обработки информации
(7) обеспечивает сжатие динамического диапазона сигнала, аналого-цифровое
преобразование с временем преобразования меньшим 100 нс, запись информации в
оперативную память с коррекцией нелинейностей передаточной функции
фотоприемника (6), расчет мощности лазерного импульса и последующую оперативную
обработку и интерпретацию результатов. Интерпретация результатов лазерного зондирования
состоит из двух этапов и относится к классу обратных задач, то есть
задач, связанных с определением параметров какого-либо объекта по данным
измерений реакции этого объекта на
физические величины. В атмосферной оптике к классу обратных задач
относятся методы, связанные
с определением оптических и микрофизических характеристик по
измеренному результату взаимодействия аэрозольных
частиц с электромагнитным
излучением. Первым и во многом определяющим этапом в извлечении количественной
информации о состоянии атмосферы из результатов лазерного зондирования
является решение лидарного уравнения
относительно оптических параметров среды.
Процесс
лазерного зондирования атмосферы описывается известным уравнением лазерной
локации [4]. Пространственное изменение оптических параметров на трассе
зондирования связано с величиной обратного рассеяния (отраженного сигнала)
уравнением (1):
![]() (1)
(1)
где P (Z) - амплитуда отраженного сигнала,
обусловленная однократным рассеянием в
атмосфере с расстояния Z, поступающая на фотоприемник лидара;
A -
аппаратурная константа;
![]() - мощность излучения
импульса;
- мощность излучения
импульса;
![]() - объемный
коэффициент обратного рассеяния;
- объемный
коэффициент обратного рассеяния;
![]() - объемные коэффициенты рассеяния и ослабления
соответственно;
- объемные коэффициенты рассеяния и ослабления
соответственно;
![]() - модуль вектора индикатрисы рассеяния назад.
- модуль вектора индикатрисы рассеяния назад.
Экспоненциальная
составляющая уравнения (1) характеризует
прозрачность атмосферы по
линии зондирования между точкой
расположения лидара и рассеивающим объемом. Информация об
оптических параметрах атмосферы
заключена в подлежащих оценке функциях
![]() .
.
Проблемы, связанные с узким
динамическим диапазоном аналого-цифрового преобразователя
В процессе лазерного
зондирования атмосферы на дальностях более трех километров диапазон изменения
сигнала обратного рассеяния может составлять несколько порядков (более 100
дБ.), что связано с обратной квадратичной зависимостью отраженного сигнала от
расстояния, а также с экспоненциальным ослаблением сигнала за счет поглощения и рассеяния
атмосферы в уравнении (1).
Несмотря на
значительный прогресс в развитии АЦП,
разрядность которых достигает 16 и даже 22 двоичных разрядов, что составляет
96-132 дБ соответственно, для регистрации лидарных сигналов из-за высоких
требований к быстродействию реальная разрядность существующих АЦП составляет
8–12 двоичных разрядов, что составляет 48-72 дБ соответственно. Таким образом, быстродействующие АЦП обладают
недостаточным динамическим
диапазоном. С целью получения
достоверной информации об искомых параметрах атмосферы с возможно большего
интервала дальностей вдоль трассы зондирования и регистрации ее в
аналого-цифровом преобразователе, обладающим довольно малым входным
динамическим диапазоном, необходимо использовать методы сжатия динамического
диапазона сигналов.
Сжатие динамического диапазона может
осуществляться в оптическом блоке
(5), фотоприемнике (6) и входном блоке
системы регистрации (7) рис. 1. В данной работе будет рассматриваться последнее.
Наиболее
эффективными функциональными методами
сжатия динамического диапазона лидарных сигналов являются метод логарифмического преобразования и метод компенсации квадрата расстояния. Для
однородной атмосферы при постоянных оптических коэффициентах (отсутствие
шлейфов) в работе [5] доказывается преимущество метода логарифмического преобразования. При наличии шлейфа
динамический диапазон изменения лидарного сигнала в первую очередь определяется
расстоянием до шлейфа и его оптическими характеристиками.
Несмотря на более высокую теоретическую
эффективность логарифмического преобразования,
метод компенсации квадрата расстояния имеет неоспоримые преимущества с
точки зрения практической реализации как в алгоритмах управления коэффициентом
усиления, так и для алгоритмов обработки лидарных сигналов, поскольку
исключается операция умножения принимаемого
сигнала на квадрат расстояния.
Для
оценки эффективности методов определения оптических параметров атмосферы по сигналу обратного рассеяния была
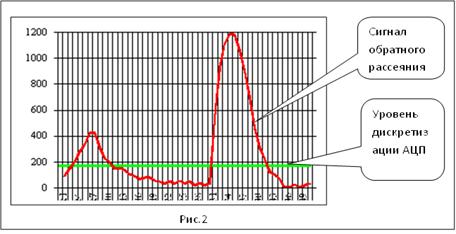
разработана имитационная модель процесса лазерного зондирования атмосферы. Некоторые результаты моделирования приведены
на рис. 2 и 3. На рис.2. дан пример сигнала обратного рассеяния при наличии
шлейфа. Ось времени представлена 50 дискретными отчетами с шагом,
соответствующим
На сигнал обратного
рассеяния наложена линия, характеризующая динамический диапазон АЦП, в виде
минимального уровня дискретизации аналогового сигнала. Разрядность АЦП
задана десятью двоичными разрядами. Таким образом, в результате выполнения
операции аналого-цифрового преобразования,
значения сигнала обратного
рассеяния, не превышающие величину, равную половине младшего разряда АЦП, будут
представлены как ноль. На рис.2 проведена линия уровня дискретизации АЦП, чтобы
проиллюстрировать, что вся информация, находящаяся ниже этой линии, будет потеряна. Это значительно влияет на границы применимости
итерационных алгоритмов решения уравнения лазерной локации.
Большинство этих алгоритмов
требуют измерения подлежащих определению оптических характеристик ![]() прямым путем на некотором участке трассы, и уже относительно этих значений оказывается
возможным определить оптические характеристики вдоль всей трассы зондирования с
приемлемой точностью. Однако наличие дискретных интервалов обработки с нулевыми
значениями сигнала в итерационных алгоритмах приводит к возникновению больших
ошибок восстановления и даже к остановке алгоритма. К аналогичным же проблемам
приводит использование метода
логарифмической производной и метода асимптотического сигнала,
базирующихся на вычислении значения максимально накопленного на трассе
зондирования сигнала.
прямым путем на некотором участке трассы, и уже относительно этих значений оказывается
возможным определить оптические характеристики вдоль всей трассы зондирования с
приемлемой точностью. Однако наличие дискретных интервалов обработки с нулевыми
значениями сигнала в итерационных алгоритмах приводит к возникновению больших
ошибок восстановления и даже к остановке алгоритма. К аналогичным же проблемам
приводит использование метода
логарифмической производной и метода асимптотического сигнала,
базирующихся на вычислении значения максимально накопленного на трассе
зондирования сигнала.
Однако его накопление на
участках трассы, где сигнал рассеяния соизмерим с уровнем шума квантования АЦП,
приводит к ошибкам восстановления
оптических характеристик среды, обусловленных краевым эффектом [6].
Следовательно, для обеспечения высокой точности восстановления оптических
характеристик атмосферы необходимо либо увеличивать разрядность АЦП, либо
осуществлять согласование динамических диапазоном путем соответствующего
преобразования сигнала на входе АЦП.
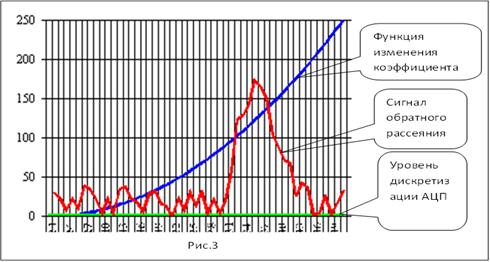
На
рис.3 приведен результат преобразования сигнала с предварительным умножением на
квадрат расстояния.
Масштабный множитель (коэффициент
усиления усилителя) изменяется в соответствии с уравнением 2
К(i)
= Co In
> i > 0 (2)
К(i)
=Co * x(i)*x(i) Ik > 1
>= In
где In –
дискретное время начала изменения коэффициента усиления (обычно определяется концом теневой зоны лидара);
Ik - дискретное время окончания изменения
коэффициента усиления (обычно
определяется предельной дальностью зондирования);
Со
– начальное значение коэффициента.
На рис.3
представлена та же реализация сигнала обратного рассеяния, которая была
приведена на рис 2. Помимо этого на графике представлен характер изменения
коэффициента, на который производилось умножение сигнала. Изменение коэффициента
усиления осуществлялось с момента окончания мертвой зоны, что снизило диапазон
его изменения. В данном случае динамический диапазон изменения коэффициента
усиления составляет 36 дБ. При этом
динамический диапазон сигнала снизился до 40дБ, что ниже динамического
диапазона даже 8-разрядного АЦП.
Проведенные
исследования с использованием разработанной имитационной модели процесса
лазерного зондирования атмосферы показали, что
параметры современных технических средств, имеющихся на коммерческом
рынке, позволяют обеспечить регистрацию сигнала рассеяния в диапазоне 145 дБ (что
соответствует 24 двоичным разрядам) с точностью 0.1%.
Предложения по практической реализации
Для
практической реализации данного метода преобразования сигнала требуется
широкополосный высокоточный усилитель с регулируемым коэффициентом усиления.
Важной характеристикой такого усилителя является диапазон регулирования коэффициента
усиления. Американская фирма Analog Devices, известная как производитель
электронных компонентов [1],
выпускает микросхему AD602, представляющую собой двухканальный, широкополосный операционный усилитель (ОУ), с управляемым
коэффициентом усиления и низким уровнем собственных шумов. Ширина полосы
составляет 35 МГц. Диапазон рабочих температур -40….+85 С. Диапазон изменения
коэффициента составляет 40 дБ. Для управления коэффициентом усиления необходимо
осуществить воздействие на управляющий вход напряжением, линейно изменяющимся от -625 МВ до +625 МВ.
Генератором управляющего напряжения может служить линейно изменяющееся напряжение, формируемое
как специальным генератором, так и
выход цифро-аналогового преобразователя (ЦАП). В качестве соответствующего ЦАП подходит
микросхема AD7242, содержащая два 12-разрядных быстродействующих CMOS ЦАП с выходными
усилителями, а также высоко скоростной последовательный интерфейс для связи с
DSP. Диапазон рабочих температур -40….+85 С.
Среди выпускаемых быстродействующих АЦП имеется
довольно широкий выбор (таблица 1).
По
технико-экономическим показателям наиболее подходит аналого-цифровой
преобразователь AD9042, который представляет собой высоко скоростной
12-разрядный АЦП с частотой
дискретизации 41 МГц с параллельным интерфейсом, позволяющим подключаться к каналу прямого доступа к памяти (КПДП) DSP.
Таблица 1
|
Тип |
Кол-во двоичных разрядов |
Частота дискретизации, МГц |
Цена дол.
США |
Рабочий диапазон
температур, С |
|
AD9057 |
8 |
60 |
15 |
-55…+125 |
|
AD9049 |
9 |
30 |
21 |
-40…+85 |
|
AD9050 |
10 |
40 |
20 |
-40С…+85 |
|
AD9020 |
10 |
60 |
533 |
-55…+85 |
|
AD9040 |
10 |
40 |
332 |
-25…+85 |
|
AD9027 |
12 |
31 |
470 |
-25…+85 |
|
AD9042 |
12 |
41 |
50 |
-40….+85 |
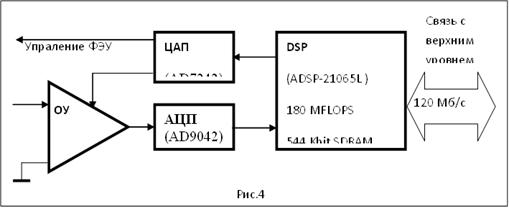
Для
управления процессом преобразования сигнала необходим быстродействующий
цифровой процессор, в качестве которого
целесообразно использовать DSP фирмы
Analog Devices семейства ADSP-21065L.
Это дешевый, высокопроизводительный
32-разрядный процессор с быстродействием
180 млн. операций с плавающей точкой и быстрым интерфейсом. Объем внутренней
памяти кристалла составляет 544 Кбит, при адресном пространстве 64 Мслов.
Память двух портовая, что обеспечивает независимый доступ как
процессора, так и КПДП со
скоростью 60 МГц. Количество каналов
КПДП равно 10. Скорость параллельного порта 240 Мбайт/сек. Встроенные два
последовательных порта со скоростью передачи 40 Мбит/сек. Процессор имеет
встроенный интерфейс с компьютером верхнего уровня (Host Processor Inerface),
который обеспечивает простое
подключение к стандартным шинам 8,16 и 32- разрядных микропроцессоров с
минимальным дополнительным оборудованием. Функциональная схема системы
регистрации приведена на рис. 4.
Наличие
больших вычислительных мощностей позволяет возложить на систему регистрации
выполнение следующих функций:
1.
Оптимальное управление
коэффициентом усиления входного усилителя с целью достижения
максимальных дальностей зондирования.
2. Управление передаточной
функцией ФЭУ.
3.
Коррекция нелинейностей измерительного тракта (передаточной
функции фотоприемника.)
4. Запись
информации в оперативную память
5. Определение мощности
лазерного импульса.
6.Реализация алгоритмов выделения сигнала на фоне
шума.
7.Восстановление оптических параметров
атмосферы.
Предлагаемая система регистрации и оперативной обработки
лидарных сигналов с широким динамическим
диапазоном позволяет:
1.
Существенно увеличить дальность зондирования при одновременном уменьшении мощности лазера, что позволяет перейти
к использованию портативных установок при построении систем атмосферного
мониторинга.
2.
Высокая надежность элементной базы в широком диапазоне рабочих
температур открывает возможность реализации необслуживаемой установки.
Невысокая стоимость
элементной базы AD602 $62, AD7242
$60, AD9042 $50 (в сумме менее
$200) при серийном выпуске делает
систему весьма конкурентно способной.
Литература
1. Designer’s reference manual. Analog Devices, Inc., 1998.
2.
Пупырев Е.И. Опыт конструктивной экологии. Прима-пресс. Москва 1997.
3.
Назаров И.М., Разумихина Т.Б., Рождественская В.И., Фридман Ш.Д.,
Журавлева Н.Г., Легович Ю.С., Бойченко В.Л.,Кузнецов В.И., Холодных А.И.
Автоматизированный лидарный комплекс для контроля аэрозольных выбросов.
Гидрометеоиздат,
4.
Лазерный контроль атмосферы. Под редакцией Э.Д.Хинкли. Мир. Москва,
1979.
5.
Тихомиров А.А.. Сравнительный анализ методов сжатия динамического
диапазона лидарных сигналов. 8 Всесоюзный симпозиум по лазерному и
акустическому зондированию атмосферы. Тезисы докладов. Томск, 1984.
6.
Зуев В.Е., Креков Г.М., Крекова М.М.
Лазерное зондирование атмосферного аэрозоля.- В кн.: Дистанционное
зондирование атмосферы, Новосибирск, Наука, 1978.