Универсальный
алгоритм размещения связных объектов
в
двухмерном пространстве
Е.В.
Тишкевич,
асп.
МТУСИ. г. Москва,
Е.И.
Артамонов,
зав.
лаб., д.т.н., проф.,
ИПУ РАН, г. Москва
Введение
Задача оптимального
размещения системы взаимосвязных объектов в некоторой ограниченной области
пространства (в монтажном пространстве) при выполнении требований высокой
плотности размещения с минимизацией некоторой функции качества и выполнением
целого ряда других технических ограничений встречается в проектировании достаточно
часто. К таким задачам можно отнести планирование площадей застроек
производственного предприятия, размещение в цеху станочного оборудования,
размещение оборудования в корпусе самолета, размещение радиокомпонентов на
плате и т.п.
Задача
размещения
В случае
проектирования радиоэлектронных устройств размещению предшествует компоновка, а
результаты размещения используются при построении оптимальных соединений
компонентов и получении графической документации.
В машинном
проектировании наиболее разработанными являются методы размещения
одногабаритных объектов, когда решение задачи сводится к определению суммарных
длин связей каждого неразмещенного объекта с уже размещенными. Под связью при
этом понимается периметр прямоугольника, ограничивающего связь, или величина,
равная площади этого прямоугольника, или длина связи по алгоритму Прима в той
или иной метрике и т.д. При этом можно однозначно определить одну из заранее
назначенных позиций для размещения объекта.
Ниже описывается
алгоритм, универсальность которого заключается в возможности получать различные
варианты размещения, оптимальные в некотором смысле, как одногабаритных, так и
разногабаритных объектов с коэффициентом заполнения поля, близким к единице.
Отсутствие
необходимости в начальном размещении, простота реализации, универсальность,
декомпозиционный подход, снимающий практически ограничения на размерность задач
размещения, возможность сопряжения с программой трассировки следует отнести к
основным достоинствам описываемого ниже алгоритма размещения.
Идея алгоритма
группировки заключается в следующем. Пусть задано множество взаимосвязанных
объектов ![]() . Каждому объекту mJ соответствует вектор описания
. Каждому объекту mJ соответствует вектор описания
![]() , а множеству М – множество векторов описания
, а множеству М – множество векторов описания ![]() .
.
Задача заключается в
разбиении М по множеству X на m групп так, чтобы каждый объект mi
принадлежал одной и толькой одной группе и чтобы объекты, принадлежащие одной
группе, были "близкими", а объекты, принадлежащие разным группам,
"неблизкими" в некотором смысле.
Для решения этой
задачи необходимо количественно определить понятие "близости". В
некоторых случаях число групп m можно выбрать априорно, но в общем случае этот
параметр должен быть определен в процессе решения оптимизационной задачи. Пусть
вектор описания содержит одну измеряемую характеристику и известна матрица А,
определяющая связность элементов. Коэффициент "близости" mi
объекта со всеми объектами, входящими в J группу, определим как отношение:
![]() ,
,
где nJ
– число
элементов, входящих в группу;
![]() – сумма числа связей mi
элемента с nJ объектами, входящими в группу;
– сумма числа связей mi
элемента с nJ объектами, входящими в группу;
T – эвристическая
константа
Объект
входит в группу, если величина ![]() не превосходит
некоторого порогового значения εJ для J группы. Сложность
каждой группы ограничена сверху количеством входящих в нее объектов.
не превосходит
некоторого порогового значения εJ для J группы. Сложность
каждой группы ограничена сверху количеством входящих в нее объектов.
Минимизация
функции качества позволяет определить оптимальное значение m.
![]() ,
,
где ![]() – число межгрупповых связей
J
группы;
– число межгрупповых связей
J
группы;
![]() – число внутригрупповых связей при разбиении
множества объектов на m
групп.
– число внутригрупповых связей при разбиении
множества объектов на m
групп.
Величина
![]()
является мерой близости
между I
и J
группами,
где nI и nJ – число
элементов в I и J группах соответственно;
SIJ - межгрупповые
связи между ними.
Каждая
группа может рассматриваться как новый объект. На монтажном поле размещают
вначале группы объектов, а затем объекты внутри групп. Такая схема позволяет
сохранить универсальность параллельных алгоритмов размещения, в то же время
увеличивается быстродействие за счет уменьшения размерности частичных задач.
В
алгоритме рассматриваются две постановки задачи размещения: размещение объектов
на монтажном поле, когда коэффициент заполнения η ≤ 0,6;
размещение объектов на монтажном поле, когда коэффициент заполнения η
> 0,6.
В
свою очередь задача размещения в первой постановке подразделяется на два
варианта: размещение объектов с различными линейными размерами, когда интервал
разбиения на несколько порядков меньше размеров элементов и по сути решается
непрерывная задача; размещение объектов, когда дискрет таков, что число узлов
сетки, в которые помещаются характерные точки элементов, сравнимо с числом
элементов. В этом случае задается также описание монтажного поля множеством
координат позиций, в которые размещаются объекты. Эта версия используется
также для размещения одногабаритных объектов.
Для
обеих постановок можно сформулировать две задачи.
Задача поместимости.
В данной области найти хотя бы один вариант размещения объектов без
пересечения при η < 1.
Задача конструирования.
Из всех вариантов размещения выбрать хотя бы один, удовлетворяющий всем
заданным ограничениям (теплофизической совместимости, минимума суммарной длины
связей, формы и др.).
В
качестве проекций объектов на монтажную плоскость обычно берутся
геометрические фигуры, допускающие простое аналитическое описание своих
оболочек. Оболочку объекта можно рассматривать в качестве его геометрической
модели, что дает возможность учитывать параметры объекта, не связанные с его
конфигурацией. Для упрощения описания оболочек можно положить, что зоной
влияния является описанный параллелепипед с основаниями, параллельными
монтажному полю. Для двухмерного случая рассматриваются проекции зоны влияния
на монтажную плоскость. Принятое допущение сильно упрощает задачу и алгоритм ее
решения. Характер задачи плотного размещения требует перевода всех размеров
объектов, монтажного поля, запрещенных зон в дискретные, что осуществляется
программно. Это позволяет исключить иррациональность в размерах объектов и
обеспечить хорошее сопряжение их оболочек.
Для
задачи размещения в первой постановке число объектов в группе ограничено сверху
выбранным методом оптимизации функции качества. Задача нахождения глобального
экстремума функций многих переменных не решена в общем виде в том смысле, что
не существует единого алгоритма, с помощью которого можно решить любую такую
задачу.
Метод
С.А. Пиявского (Институт кибернетики АН УССР) отвечает, как показало
практическое использование предлагаемой методики, сформулированным выше
требованиям. Предлагаемая эвристическая процедура приводит к
удовлетворительному решению поставленной задачи, что, конечно, не означает, что
решение является строго оптимальным в каком-то смысле.
Качество
размещения объектов внутри группы оценивается по суммарной длине связей L
с ограничением по длине наибольшей связи.
![]() ,
,
где aij
– число связей i и j объектов из kj,
назначенных в группу.
Пространство
поиска имеет размерность 2Кi. Точкам этого пространства
соответствуют всевозможные размещения ki элементов группы
на монтажной плоскости. Экстремум функции качества ищется в 2Кi -мерном
параллелепипеде.
![]()
![]()
где i –
1, 2, … , ki,.
Алгоритм
поиска экстремума базируется на двух основных идеях, первая из которых
принадлежит С.А. Пиявскому, вторая – Бруксу (Великобритания) .
Алгоритм
поиска в общих чертах состоит в следующем:
1) с помощью датчика случайных чисел с равномерным
распределением в 2Ki-мерном параллелепипеде формируются
последовательные случайные точки, в которых вычисляется значение критерия
качества;
2) по каждой паре точек с учетом вычисленного в
них критерия качества вычисляется радиус шара R в пространстве поиска с
центром в точке с "худшим" значением критерия качества, а параметры
"лучшей" точки заполняются.
![]() ,
,
где С – константа Липшица.
В
дальнейшем критерий качества вычисляется лишь в тех случайных точках, которые
попадают в дополнение к объединению совокупности этих шаров. Тем самым в
процессе поиска исходный параллелепипед покрывается все большим числом шаровых
областей до тех пор, пока 2Кi -мерный объем
дополнения не окажется меньше заданного числа (число δ – заданная
точность по аргументу);
3) мера дополнения оценивается по методу
Монте-Карло;
4) константа Липшица С критерия качества
оценивается методом доверительных интервалов по некоторым предварительно
вычисленным значениям критерия качества в некотором числе случайных точек. Эти
значения в последующем используются так, как описано в пункте 2. Константа
Липшица в процессе поиска уточняется;
5) после того, как мера дополнения к шаровым
областям станет меньше заданного числа, исходная область поиска
"поджимается", т.е. заменяется пересечением исходного параллелепипеда
с новым, у которого стороны в Q раз меньше (Q – эвристическая
константа) и центр которого находится в "лучшей" точке предыдущего
этапа поиска;
6) поиск в новой области ведется так же, как и в
предыдущей, и вся изложенная выше процедура повторяется циклически до тех пор,
пока "лучшие" значения критерия качества на двух последовательных
этапах не станут отличаться меньше, чем на ε (ε
>
0 есть точность вычисления экстремума).
Для
формирования точки в пространстве поиска определяются ориентация каждого
объекта из выбранной группы и его положение на плоскости. Для определения
ориентации происходит обращение к датчику случайных чисел с равномерным
распределением на отрезке (0,1). Если ![]() , то max (аi, bi)
параллельна оси X. Если
, то max (аi, bi)
параллельна оси X. Если ![]() , то max (аi, bi)
параллельна оси Y
(ξ
– случайная величина отрезка (0,1)).
, то max (аi, bi)
параллельна оси Y
(ξ
– случайная величина отрезка (0,1)).
По
ориентации элемента определяется допустимая зона координат на монтажной
плоскости (условие поместимости). Если признак ориентации I, то зона координат для
элемента из группы имеет размеры:
![]() ;
; ![]() .
.
В
зону координат случайно выбрасывается точка и производится линейное
преобразование:
![]() ;
; ![]() ,
,
где Ai0,
Bi0
– координаты нижней левой вершины рабочей зоны для i элемента;
xi,
yi
– координаты центра этого элемента.
По
размерам элемента и координатам его центра определяются координаты вершин, и
они запоминаются. Те же операции выполняются для (i + I)-го элемента.
Далее
определяются пересечения (i
+ I)-го
элемента с предшествующими i
элементами.
Пересечение
двух прямоугольников с параллельными сторонами – прямоугольник. Пусть
координаты вершин прямоугольников:
![]()
![]()
Признаком
непустого пересечения двух прямоугольников является выполнение неравенств:
![]() и
и ![]()
Если
пересечение пусто, то определяются ориентация и координаты следующего
элемента, если непусто, то ориентация и координаты (i + I)-го элемента
определяются заново. Процедура повторяется, пока не будут исчерпаны все
элементы размещаемой группы. Размещение без пересечения фиксируется.
Фиксированное размещение есть 2Ki-мерная точка для
вычисления функции качества.
При
размещении объектов, когда дискрет таков, что число узлов сетки, в которые
помещаются центры элементов, сравнимо с числом элементов, все процедуры
сохраняются, но так как вероятность случайного выброса незанятой ячейки
уменьшается с увеличением числа размещенных элементов, производится случайный
выбор ячейки только из числа незанятых ячеек, а занятые ячейки запоминаются.
Пусть
ячейки и ряда пронумерованы, как показано на рис. 1. Число ячеек будет равно: ![]() ,
,
где q – рядность по
вертикали; p – по горизонтали.
Случайным
образом выбирается номер ячейки: ![]()
где i возрастает, принимая
последовательно значения i
= 1, 2, ... , n.
Тогда номер ряда по
вертикали равен: ![]() ,
,
Номер ряда по
горизонтали: ![]() .
.
Тогда координаты
элемента будут: ![]() ;
; ![]() ,
,
где a0
, b0
– координаты первой ячейки; t1 t2 – соответственно шаг по
горизонтали и шаг по вертикали.
Если
I1
= 0, то присваивается значение I1 = q.
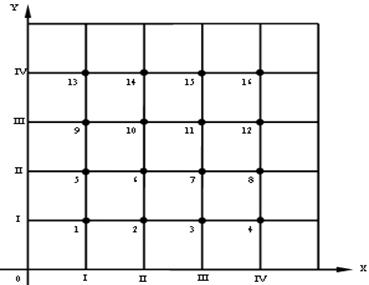
рис. 1. Расположение
ячеек на монтажном поле

рис. 2. Примеры решения задачи размещения в различных
постановках:
а
– размещение 30 объектов с фиксированным объектом № 30; б – размещение без
фиксации объекта № 30; в – размещение
тех же одногабаритных объектов на заранее указанные позиции с фиксированной
ориентацией
На
рис. 2 и рис. 3 приведены примеры реализации алгоритма. На рис. 2,а
демонстрируется чувствительность алгоритма к связности объектов. Коэффициент
заполнения выбран специально небольшим.


а б
рис. 3. Примеры
размещения элементов: а – плотное
размещение 11 элементов; б – размещение
107 разногабаритных объектов
Объект
№ 30 фиксирован в правом верхнем углу монтажного поля, и все объекты, связанные
с ним, вытягиваются в цепочку от объекта № 30 к остальной группе. На рис. 2,б
показано размещение объектов для той же задачи без фиксации элемента № 30.
На
рис. 3,б приводится размещение 107 элементов с коэффициентом заполнения η
= 0,55.
При
размещении объектов на монтажном поле, когда коэффициент заполнения η
> 0,6 в соответствии с принятым допущением о прямоугольности
конфигурации оболочек объектов, строится убывающая и однозначная ступенчатая
функция, начиная с левого нижнего угла поля.
Пусть
размещены i
объектов, тогда (i
+ I) объект размещается поочередно на каждую
иступеньку". Критерий качества считается только для положений объекта,
которые не нарушают признака убывания ступенчатой функции и ее однозначности
(рис. 4).
При
этом в качестве окончательного его размещения выбирается положение с
минимальным значением критерия качества.

рис. 4. Построение ступенчатой функции:
а
– нарушение условий убывания; б – нарушение условия однозначности; в –
нарушение условия убывания и однозначности
Пусть
построена ступенчатая функция для i
объектов.
![]() ,при
,при ![]()
где i – номер объекта;
k
– номер ступеньки y i-й
функции xi.
Пусть
далее k0
есть та ступенька размещения, на которой (i + I)
объект не приводит к нарушению признаков убывания и однозначности функции, и,
кроме того, эта позиция доставляет минимум критерию качества.
Тогда xi+1
= xi
, при k ≠ k0
, ![]() ,
, ![]() ,
, ![]() , при
, при ![]() ,
,
![]() ,
, ![]() ,
,![]() при
при ![]() ,
,
где ![]() и
и ![]() - номера двух новых ступенек, полученных из одной
старой с номером k0,
- номера двух новых ступенек, полученных из одной
старой с номером k0,
![]() .
.
На
самом деле теперь ![]() ,
, ![]() , и для всех номеров
, и для всех номеров ![]() нужна перенумерация.
При построении функции
нужна перенумерация.
При построении функции ![]() необходимо увеличить
номера ступенек, начиная с
необходимо увеличить
номера ступенек, начиная с ![]() на единицу (
на единицу (![]() и т.д.).
и т.д.).
Итак:
![]() при
при ![]() ;
;
![]() при
при ![]() ;
;
![]() при
при ![]() ;
;
![]() при
при ![]() .
.
Если
для (i + I)
объекта все позиции оказались запретными, т.е. куда бы он ни стал, нарушается
либо однозначность, либо убываемость ступенчатой функции, то критерий качества
с некоторым весовым коэффициентом учитывает площадь полости, которая
получается, если продолжить стороны этого объекта влево и вниз до пересечения
с "лестницей". И так же, как и в первом случае, фиксируется
размещение с минималь-i ным значением критерия качества. Образовавшаяся полость
"закрывается" для размещения последующих k элементов, если она не
может быть использована, так что ступенчатая функция по-прежнему остается однозначной
и убывающей.
Площадь
полости, возникающая из-за нарушения однозначности или убывания ступенчатой
функции, считается следующим образом:
![]() ,
,
где S1
– полость из-за неубывания;
S2 – полость из-за неоднозначности.
![]() ,
,
где kh – номер
ступеньки, с которой ![]() .
.
![]() ,
,
где kh – номер
последней ступеньки, над которой нависает (i + I)-й элемент.
Программа
по алгоритму содержит около 900 операторов и работает в составе
автоматизированной системы проектирования "Графика", разработанной в
Институте проблем управления Российской Академии Наук.