Система контроля и
управления магнитной капсулой эндоскопа[1]
С.И. Касаткин,
д.т.н., зав. лаб.,
П.А. Поляков,
д.ф.-м.н.
проф.,
О.П. Поляков,
к.ф.-м.н., асс.
физ. фак-т МГУ,
г. Москва,
Е.И. Артамонов,
д.т.н., проф., зав. лаб.,
А.Б. Балабанов,
вед. инж., асп.,
В.А. Ромакин,
к.т.н., с.н.с.,
ИПУ
РАН, г. Москва
Введение
Последние годы, в связи с развитием микроэлектроники и
появлением новых измерительных и вычислительных комплексов, появилась
возможность решать недоступные ранее научно-технические задачи. Одним из таких
примеров является развитие теории магнитной локации на основе использования
набора тонкоплёночных магниторезистивных датчиков магнитного поля для
определения пространственных и угловых координат магнитного диполя [1–4]. В
настоящее время в мире ведутся разработки систем магнитных капсул эндоскопов с
определением их положения и направления и, одновременно, управлением их
движения, используя градиентное магнитное поле. Данные о проведении на сегодня
подобных работ в РФ авторам не известны.
Первыми капсулу с камерой для эндоскопа стали
применять в Израиле с
Исследования в этом направлении ведутся, в
частности, в Китайском Университете Гонконга. Сотрудниками Университета
предложена схема решения обратной задачи для магнитной локации диполя, то есть
определения пространственных и угловых координат одиночного магнитного диполя,
и экспериментально реализовано ряд макетов определяющих ориентацию и положение
маленького магнита. Измерение магнитных полей, создаваемых постоянным магнитом,
производилось набором из 16 чипов, каждый из которых состоит из трёх одноосных
анизотропных магниторезистивных датчиков магнитного поля, измеряющих магнитное
поле по трём осям и усилителей считывания. Там же предложен вариант управления
движением магнитной капсулой при помощи внешнего магнитного поля. Несмотря на
большое количество датчиков, в [5]
удалось регистрировать магнит с приемлемой точностью порядка 10% в объеме куба
с ребром
Постановка задачи локации
магнитного диполя
Рассмотрим далее проблемы, возникающие при разработке
конкретных устройств и методик магнитной локации на основе магниторезистивных
датчиков на примере конкретной задачи определения пространственного
местоположения и ориентации магнитного диполя. Эта конкретная и простая
формулировка задачи о магнитной локации имеет важное практическое значение, так
как любое намагниченное тело или магнитная неоднородность на расстояниях, много
больших их характерных размеров, может рассматриваться как магнитный диполь.
Формальное математическое решение проблемы выглядит простым. Требуется
разместить в некоторой области пространства определенное количество датчиков
различной ориентации (датчик измеряет только одну составляющую магнитного поля)
и провести измерение составляющих вектора напряженности магнитного поля ![]() . Далее, используя известную формулу для напряженности поля
. Далее, используя известную формулу для напряженности поля ![]() , создаваемую магнитным диполем
, создаваемую магнитным диполем ![]() на расстоянии
на расстоянии ![]()
![]() , (1)
, (1)
можно определить компоненты вектора
магнитного момента диполя ![]() и радиус-вектора
и радиус-вектора ![]() его местоположения.
Возможен и другой, временной, способ магнитной локации, когда используют один
датчик, перемещая его в пространстве и проводя измерения составляющих вектора
напряженности магнитного поля в различных точках (такой вариант, однако,
возможен, только если заранее известно, что диполь не изменяет своего положения
во время измерения). Возникает вопрос: сколько требуется датчиков или измерений
составляющих магнитного поля, чтобы однозначно определить радиус-вектор местоположения
диполя
его местоположения.
Возможен и другой, временной, способ магнитной локации, когда используют один
датчик, перемещая его в пространстве и проводя измерения составляющих вектора
напряженности магнитного поля в различных точках (такой вариант, однако,
возможен, только если заранее известно, что диполь не изменяет своего положения
во время измерения). Возникает вопрос: сколько требуется датчиков или измерений
составляющих магнитного поля, чтобы однозначно определить радиус-вектор местоположения
диполя ![]() и его вектора
магнитного момента
и его вектора
магнитного момента ![]() ?
?
Как будет показано далее, использование малого количества датчиков делает задачу очень чувствительной к начальным данным. Одним из способов исключения этого недостатка является использование большего количества датчиков, в частности, описана возможность реализации устройства на основе устойчивого алгоритма, использующего 12 датчиков (4 тройки датчиков в четырех различных точках). Далее будет рассмотрено более компактное устройство, содержащее 9 датчиков, которые размещены в трёх точках (три тройки датчиков).
Рассмотрим вопрос однозначности отображения пространства исходных данных — показаний датчиков {H1x, H1y, H1z, H2x, H2y, H2z} — на пространство решений {x, y, z, px, py, pz} следующей системы уравнений:
 ,
,где ![]() — радиус-вектор второй
тройки датчиков (первая тройка находится в начале координат),
— радиус-вектор второй
тройки датчиков (первая тройка находится в начале координат), ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Анализ однозначности решения задачи
локации магнитного диполя
Как известно, однозначность решения задачи (2) определяется якобианом
Полученное выражение для якобиана J представляет собой кубический многочлен относительно px, py, pz.
Следовательно, задавая произвольные значения x, y, z, px, py,
можно всегда найти хотя бы одно такое действительное значение pz,
которое бы обращало значение якобиана (3) в нуль. Исключение составляют лишь те точки, в
которых коэффициент при pz3
равен нулю, однако множество таких точек составляет лишь двумерное многообразие
(указанный коэффициент содержит только x, y и z
в силу линейности напряженности магнитного поля по ![]() ), в то время как множество точек, в которых этот коэффициент
не равен нулю, а J
= 0, составляет пятимерную гиперповерхность в шестимерном пространстве
), в то время как множество точек, в которых этот коэффициент
не равен нулю, а J
= 0, составляет пятимерную гиперповерхность в шестимерном пространстве ![]() , поэтому случай равенства нулю коэффициента при pz3
рассматриваться не будет, так как он не вносит существенного изменения в общую
картину.
, поэтому случай равенства нулю коэффициента при pz3
рассматриваться не будет, так как он не вносит существенного изменения в общую
картину.
Наличие точек, в которых якобиан равен нулю, не означает,
что задача не имеет однозначного решения, но это указывает на то, что в
окрестности указанных точек погрешность результатов будет велика, то есть малые
отклонения в определении значений ![]() и
и ![]() могут повлечь за собой
большие ошибки расчета
могут повлечь за собой
большие ошибки расчета ![]() и
и ![]() . Математически это представляет собой классический пример
некорректно поставленной задачи.
. Математически это представляет собой классический пример
некорректно поставленной задачи.
В силу некорректности данной задачи критерием качества метода следует считать не погрешность получаемых решений, а процент «промахов», то есть таких наборов исходных данных, расчет по которым приводит к результатам, существенно отличающимся от «правильных». Численный расчет показывает, что, несмотря на большое количество точек, в которых J = 0, правильное решение получить возможно, хотя и не для любых положений диполя. В зависимости от метода расчета и используемой точности можно достичь 90–97% «правильных» результатов. Если фиксировать модуль дипольного момента, то «промахи» все равно есть, однако их количество можно еще уменьшить до ~0,2%. Важно, что точность расчета в данной задаче играет второстепенную роль — имеется некоторое «граничное» значение точности (зависящее, естественно, от метода) такое, что дальнейшее ее увеличение не улучшает результаты, а то и ухудшает (в смысле количества «промахов», погрешность «правильных» результатов при этом может уменьшаться, однако и это необязательно).
Двумерный случай
Более простой разновидностью приведенной выше задачи является определение положения и ориентации магнитного диполя на плоскости. Якобиан отображения пространства {H1x, H1y, H2x, H2y} на пространство {x, y, px, py} в этом случае приобретает следующий вид:

Выражение в фигурных скобках представляет собой квадратичную форму относительно px и py. Для выяснения того, при каких значениях x и y эта форма является положительно определенной (отрицательно определенной она быть не может в силу того, что коэффициент при px2 неотрицателен при любых x и y), найдем значение определителя этой формы:
 (5)
(5)
где ![]() . Полученное выражение равно нулю лишь при y = 0 и
. Полученное выражение равно нулю лишь при y = 0 и ![]() , следовательно, квадратичная форма, входящая в выражение для
якобиана (4), является положительно определенной во всех точках,
кроме точек, совпадающих с положением датчиков. В окрестности этих точек
якобиан (4) стремится к бесконечности, поскольку выражение в
фигурных скобках стремится к нулю как r 4, а перед скобками стоит коэффициент
порядка r –10.
, следовательно, квадратичная форма, входящая в выражение для
якобиана (4), является положительно определенной во всех точках,
кроме точек, совпадающих с положением датчиков. В окрестности этих точек
якобиан (4) стремится к бесконечности, поскольку выражение в
фигурных скобках стремится к нулю как r 4, а перед скобками стоит коэффициент
порядка r –10.
Отсутствие нулей якобиана, однако, не говорит об однозначности отображения {H1x, H1y, H2x, H2y} на {x, y, px, py}, поскольку имеется две особенности в окрестности каждого датчика.
Покажем, что систему (2) в двумерном случае можно свести к нахождению корней
многочлена. Разрешая каждое из векторных уравнений системы (2) относительно ![]() , получаем
, получаем
 .
.Приравняем правые части этих уравнений, перемножим
полученные уравнения, поменяв местами левую и правую часть, разделим обе части
на ![]() и вычтем правую часть
из левой:
и вычтем правую часть
из левой:
 (7)
(7)
где k = x/y. Полученное выражение представляет собой квадратный многочлен относительно y, умноженный на y2.
Подставляя корни этого многочлена в уравнение, представляющее собой равенство компонент px из системы (6):
![]() , (8)
, (8)
получаем уравнение относительно k. Возводя обе части этого уравнения в квадрат, собирая члены, содержащие квадратный корень в одной части уравнения, а остальные — в другой и еще раз возводя в квадрат, получаем полиномиальное уравнение, которое, как известно, имеет конечное количество корней (не все из которых, однако, будут являться корнями системы (2), поскольку использовалось возведение в квадрат). Для численного расчета этих корней можно использовать достаточно эффективные методы, а затем отбирать решения путем проверки равенств (2) или (6). Численные вычисления показывают, что, как правило, появляются от 2 до 4 действительных решений системы (2), среди которых, естественно, есть и «правильное», однако надежного критерия отбора без ограничения области, в которой выполняется поиск решения, не существует.
Для отбора «правильного» решения возможно использование различных методов (отметим, что ни один из приведенных далее способов не дает стопроцентной гарантии отсутствия «промахов»):
а. фиксирование значения модуля дипольного момента – довольно надежный способ выбора «правильного» решения, недостатком является ограничение количества искомых переменных: вместо {x, y, px, py} фактически ищется {x, y, φ}, где φ – угол между направлением дипольного момента и осью абсцисс;
б. ограничение области поиска диполя – если выбрать эту область не рядом с датчиками, а на расстоянии, большем a, то можно подобрать такую область, в которой действительное решение будет только одно (это сужает возможности системы, но несущественно – диапазон показаний датчиков все равно ограничен разрядностью АЦП);
в. использование предыстории – считается, что диполь движется и вращается непрерывно, поэтому в каждый момент времени ищется решение, близкое к найденному ранее – может быть тоже эффективным методом, который, однако, все равно может нуждаться в ограничении области поиска (возможно, не таком сильном, как для п. б.), поскольку система (2) может иметь и кратные действительные корни.
Для решения описанных выше двумерной и трехмерной задач магнитной локации были построены численные алгоритмы, позволяющие в реальном времени находить положение магнитного диполя. Эти алгоритмы позволяют определять положение и ориентацию диполя для трёх троек МР датчиков магнитного поля.
Общий случай анализа областей
неустойчивости при наличии большого количества датчиков
Если число используемых троек датчиков больше трех, то области неустойчивостей решения обратной задачи магнитной локации магнитного диполя уменьшается. Анализ областей неустойчивостей в этом случае можно свести к рассмотренному выше случаю. Пусть у нас имеется три тройки датчиков. В этом случае в области, где якобиан преобразования показаний полей первых двух троек датчиков
![]()
существует взаимно однозначная связь между значениями полей, координатами и компонентами вектора магнитного диполя, то есть
![]()
Область, где
и вблизи ее, является областью неустойчивости решения обратной задачи для показаний этих датчиков. Аналогично, области неустойчивости решения обратной задачи для показаний 1-их и 3-их , а также 2-их и 3-их троек датчиков определяются условиями

В общем случае области неустойчивости решений, определяемые этими трем соотношениями, могут не пересекаться, тогда устойчивое определение положения магнита во всех точках пространства возможно. При определенной ориентации и положении датчиков может существовать область пересечения, то есть общая область решений приведенных трех уравнений, однако она будет существенно меньше, чем в случае двух троек датчиков и, соответственно, будет существенно меньше число промахов при решении обратной задачи. В случае большего числа датчиков, вероятность пересечения областей неустойчивостей всех пар датчиков становится еще меньше. Поэтому использование большего числа датчиков позволяет решить обратную задачу магнитной локации с большей точностью.
Области применения
Отметим, что описанная задача является масштабируемой: характерный геометрический размер области, в которой производится поиск диполя, определяется базой – расстоянием между тройками датчиков, следовательно, для изменения размеров этой области достаточно изменить базу. Аналогично, изменение чувствительности датчиков влияет лишь на диапазон возможных значений дипольного момента, но не на качество расчета. Таким образом, одну и ту же программу без каких-либо значительных изменений можно использовать как для определения местоположения движущейся в кишечнике капсулы эндоскопа и пространственно-векторной мыши, используемой для тренажёра или работы с плохо наблюдаемым объектом и перемещающихся в объеме нескольких кубических дециметров, так и для поиска дефектов в металлоконструкциях размерами в несколько метров, и для выявления неоднородностей в магнитосфере на расстояниях до нескольких километров.
В более сложных случаях, можно снабдить управляемый объект несколькими магнитными диполями или наблюдать сразу несколько объектов с одним диполем, излучающих переменное магнитное поле с различной частотой и, селектируя сигналы диполей по частоте, параллельно решать несколько задач по определению местоположения каждого диполя.
Таким образом, магнитная локация найдет применение в самых разнообразных областях. Во-первых, в традиционных задачах обнаружения крупных намагниченных тел таких, как морское судно. Во-вторых, магнитную локацию можно использовать для регистрации вариации магнитного поля Земли, выявления в атмосфере или магнитосфере локальных магнитных неоднородностей. В-третьих, для бесконтактного определения дефектов в различных металлических конструкциях. Например, для ранней диагностики возможных разрывов в нефтепроводах или газопроводах или городских теплотрассах. Вполне вероятно, что с помощью магнитной локации окажется возможным фиксировать возникновение в металлических конструкциях мостов, железнодорожных рельсах микроскопических трещин и других микроскопических дефектов и тем самым предотвращать катастрофы. Магнитная локация найдёт применение и в медицине для определения местоположения микроскопического магнитного зонда в различных органах или сосудах.
Структурная схема макета для
исследования желудочно-кишечного тракта
Для проверки работоспособности численного алгоритма нахождения положения и ориентации магнитного диполя, а также имитации работы системы контроля и управления магнитной капсулой эндоскопа была разработана структурная схема макета (см. рис. 1). Схема содержит исследуемый объект (на рисунке условно показана модель кишечника с капсулой М), источники магнитного поля (Н), три блока по 3 магниторезистивных датчиков (3 х МРД), блок предварительной обработки сигналов с датчиков и персональный компьютер (РС) со специализированной программной системой (СПС). СПС управляет перемещением и ориентацией капсулы М за счет изменения положения источников магнитного поля Н, генерирует траекторию движения магнитной капсулы по виртуальной 3D-модели желудочно-кишечного тракта, определяет показания датчиков для положения и ориентации капсулы на каждом шаге траектории (прямая задача магнитной локации) и по этим показаниям вычисляет теоретические положение и ориентацию капсулы (обратная задача).
К настоящему времени разработано программное обеспечение СПС [6], созданы виртуальная 3D-модель части желудочно-кишечного тракта (см. рис.
2), векторная 3D-модель
траектории движения магнитной капсулы (на рис.3 гладкая линия), проведен сравнительный анализ векторной 3D-модели траектории движения с теоретическим расчетом
траектории через показания датчиков (на рис. 3 ступенчатая линия). При этом
геометрический размер области, в которой производился поиск капсулы: xÎ[0, 0.5], yÎ[0, 0.5], zÎ[0, 0.25]
(м). Среднее отклонение теоретических данных от исходных на показанной
траектории составило 6,2e-3 м .
Показана возможность создания макета, определяющего пространственные и
угловые координаты движущейся капсулы эндоскопа на основе набора из трёх троек
магниторезистивных датчиков магнитного поля. Приведен численный алгоритм
решения задачи магнитной локации и показана его работоспособность за счет
имитации движения капсулы.
рис.1.
Структурная схема макета для исследования желудочно-кишечного тракта
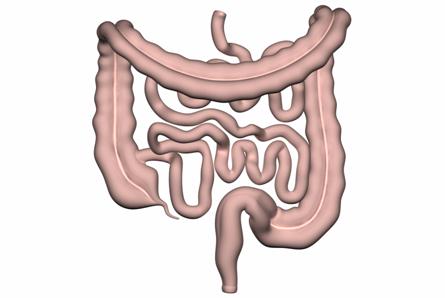
рис. 2. Объемно-геометрическая модель кишечника
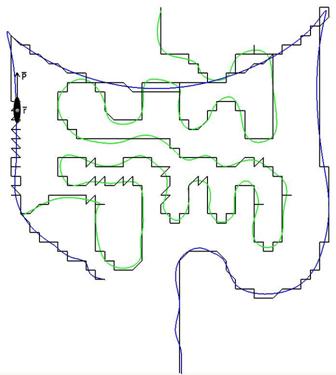
рис.3. Траектория движения магнитной капсулы
Литература
1. С.И. Касаткин, А.М. Муравьёв и др. Анизотропные магниторезистивные датчики магнитного поля и тока // АиТ. -2009, №6. - С. 141–152.
2. С.И. Касаткин, П.A. Поляков и др. Манипулятор для виртуальной реальности // Датчики и системы. - 2001, №11. - С. 6–9.
3.
С.И.
Касаткин, П.А. Поляков, А.Е. Русаков, В.А. Ромакин. Пространственно-векторная
мышь в интерактивных системах // Материалы междунар. конф. и выставки
CAD/CAM/PDM. - 2006. - C.160–164.
4.
S.I. Kasatkin, O.P. Polyakov,
N.E. Rusakova, A.E. Rusakov On uniqueness of solution of a reverse problem of
magnetic location // JMMM. 2006. V.205. N.2. P. 361-364.
5.
X.
Wang. Study on magnetic localization and actuation of active capsule endoscope
// Thesis. 2006. The
6.
Артамонов
Е.И., Балабанов А.В., Ромакин В.А., Щегольков М.Ю. Принципы создания интерактивных
технических руководств / Материалы 35-й междунар. конф. «Информационные
технологии в науке, образовании, телекоммуникации и бизнесе (IT+S&E*08)». —
Открытое образование, 2008. — С. 97-98.