Исследование адаптивного ПИ-регулятора в среде
программного комплекса "МВТУ"
О.С. Козлов,
доц, к.т.н.,
Л.М. Скворцов,
зав.лаб., к.т.н.,
МГТУ им. Н.Э. Баумана, kozlov7@power.bmstu.ru, г. Москва
Рассматривается
адаптивный ПИ-регулятор, построенный на основе интерполяционного метода синтеза
систем управления. Построение модели такого регулятора и ее исследование осуществляется
в среде программного комплекса "Моделирование в технических
устройствах" (ПК "МВТУ").
ПК
"МВТУ" предназначен для исследования динамики и проектирования
технических систем различного назначения. По своим возможностям он является альтернативой
программным продуктам Simulink и Vissim. Математические модели в
ПК "МВТУ" формируются в виде структурных схем, элементы которых
описываются дифференциальными и разностными уравнениями, непрерывными и
дискретными передаточными функциями, алгебраическими соотношениями и логическими
условиями. Обширная библиотека типовых блоков, встроенный язык программирования
и удобный редактор структурных схем обеспечивают построение и наглядное
представление на экране компьютера самых разнообразных моделей. ПК
"МВТУ" позволяет выполнять моделирование и статистический анализ
результатов моделирования, параметрическую оптимизацию, линеаризацию и анализ
линейной модели, частотный и корневой синтез систем управления. Основные
возможности ПК "МВТУ" изложены в [2, 3], а более
подробную информацию и последнюю версию можно получить на сайте
http://mvtu.power.bmstu.ru.
Интерполяционный
метод синтеза систем управления [4] основывается на расчете параметров
регулятора исходя из условия совпадения передаточной функции проектируемой
системы с передаточной функцией эталонной модели в заданных точках комплексной
плоскости. Такой подход позволяет конструировать регуляторы невысокого порядка,
обеспечивающие заданные динамические свойства системы управления. На основе
интерполяционных условий можно составить уравнения относительно неизвестных
параметров регулятора. Нахождение этих параметров в схемах настройки и
адаптации сводится к получению оценок значений передаточной функции объекта в
заданных точках комплексной плоскости. Схема получения таких оценок была предложена
в [5] и использовалась при построении в ПК "МВТУ" моделей адаптивных
систем с простейшими регуляторами (ПИ, ПД, ПИД). Моделирование этих систем
показало, что предложенные схемы адаптации обеспечивают заданную настройку системы
управления при изменении параметров объекта в широких пределах. Рассмотрим
построение и исследование адаптивной системы с ПИ‑регулятором.
Пусть
![]() – передаточная функция
ПИ-регулятора, а
– передаточная функция
ПИ-регулятора, а ![]() и
и ![]() – передаточные функции
объекта и разомкнутой эталонной системы. Настройка параметров ПИ-регулятора осуществляется
на основе интерполяционного условия
– передаточные функции
объекта и разомкнутой эталонной системы. Настройка параметров ПИ-регулятора осуществляется
на основе интерполяционного условия
![]() , (1)
, (1)
где частота настройки выбрана равной частоте среза
эталонной системы ![]() . Из (1) получаем
. Из (1) получаем
![]() . (2)
. (2)
Таким
образом, нахождение параметров регулятора сводится к оцениванию значений передаточных
функций в заданной точке на мнимой оси.
Схема оценивания на основе метода наименьших квадратов (МНК) была предложена в
[5]. Проведенные эксперименты показали, что предложенная схема адаптации
обеспечивает стабилизацию системы при изменении параметров объекта, но для
настройки в заданной точке частотной характеристики входное воздействие должно
иметь достаточно широкий спектр. В противном случае, например, при медленно
изменяющемся входном воздействии, система стабилизируется, но не всегда
настраивается на эталонную модель.
Для
устранения этого недостатка использовались два способа. Первый из них хорошо
известен и заключается в подмешивании к сигналу ошибки пробного гармонического
сигнала с частотой, равной частоте настройки. Этот сигнал не должен вносить
существенного вклада в ошибку слежения, поэтому его амплитуда устанавливалась
не более 10–20% сигнала ошибки (применялась амплитудная модуляция).
Моделирование в ПК "МВТУ" показало, что такой способ действительно
обеспечивает не только стабилизацию, но и заданную настройку адаптивной системы
при различных входных воздействиях.
Второй
способ является новым и основан на предположении, что при определенных условиях
в контуре адаптации могут возникать автоколебания с необходимой частотой. С
помощью ПК "МВТУ" были исследованы различные варианты схемы адаптации,
в результате удалось найти условия, при которых возникают автоколебания.
Структурная
схема адаптивной системы с ПИ-регулятором, сформированная в ПК
"МВТУ", показана на рис. 1, где модели регулятора, объекта
и устройства адаптации представляют собой макроблоки, имеющие внутреннюю
структуру. Структурная схема устройства адаптации показана на рис. 2.
На вход регулятора, кроме сигнала ошибки, поступает с выхода устройства
адаптации векторный сигнал настраиваемых параметров ![]() .
.
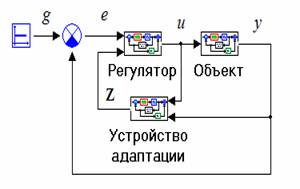
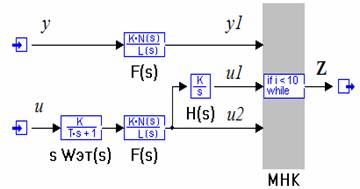
рис. 1
Структурная схема адаптивной системы
рис. 2 Структурная схема устройства адаптации
Устройство
адаптации содержит в своем составе модель разомкнутой эталонной системы в виде
передаточной функции ![]() . Примем
. Примем
![]() , (3)
, (3)
тогда параметры эталонной системы очень просто
выражаются через задаваемые значения частоты среза ![]() и запаса устойчивости
по фазе
и запаса устойчивости
по фазе ![]() :
:
![]() . (4)
. (4)
Настройка
контура адаптации на частоту ![]() осуществляется двумя
одинаковыми фильтрами с передаточной функцией
осуществляется двумя
одинаковыми фильтрами с передаточной функцией
![]() ,
,
где ![]() – скорость адаптации
(подходящее значение
– скорость адаптации
(подходящее значение ![]() ). Передаточная функция
). Передаточная функция ![]() выбрана из условия
выбрана из условия ![]() , что обеспечивает выполнение соотношения (2) для оценки
, что обеспечивает выполнение соотношения (2) для оценки ![]() .
.
Оценивание
параметров регулятора на основе соотношений (2) выполняется в блоке “Язык
программирования” (подпись "МНК") с помощью экспоненциально
взвешенного метода наименьших квадратов, уравнения которого
![]()
где ![]() – входы блока. Эти
уравнения реализованы с помощью встроенного языка программирования ПК
"МВТУ" в следующем виде:
– входы блока. Эти
уравнения реализованы с помощью встроенного языка программирования ПК
"МВТУ" в следующем виде:
input y1, u1, u2; // описание входных сигналов
init Kp = Kp0, Ki = Ki0, v = v0; // начальные условия
Kp ' = (u1 - Kp*y1)*y1/ v; //
дифференциальные уравнения
Ki ' = (u2 - Ki*y1)*y1/ v;
v ' = - beta*v + y1^2;
Z = [Kp, Ki];
output Z[2], v; // описание выходных сигналов
Начальные значения Kp0,
Ki0, v0 и параметр beta, а также некоторые другие
параметры модели задаются в окне глобальных параметров.
В
качестве примера рассмотрим объект с запаздыванием из [1]. Уравнение объекта
имеет вид
![]() . (5)
. (5)
Задающее воздействие – ступенчатая функция
![]()
а внешнее возмущение имеет вид
![]() .
.
Коэффициент k скачком изменяется в моменты времени ![]() ,
, ![]() ,
, ![]() , принимая значения
, принимая значения
![]() ,
, ![]() ,
, ![]() . (6)
. (6)
Программу изменения коэффициента k нетрудно записать c помощью языка
программирования ПК "МВТУ" в виде
if time < t1 then k = k0
else
if time < t2
then k = k1
else
if
time < t3 then k = k2 else k = k3;
Требуется
сформировать управление, при котором после окончания адаптации выполняется
условие
![]() . (7)
. (7)
Для объекта с параметрами (5) выполнение такого условия
обеспечивает ПИ‑регулятор с коэффициентами ![]() ,
, ![]() , при этом ошибка после затухания переходного процесса (
, при этом ошибка после затухания переходного процесса (![]() ) не превышает 0.01. Такая система имеет частоту среза
) не превышает 0.01. Такая система имеет частоту среза
![]() и запас устойчивости
по фазе
и запас устойчивости
по фазе ![]() . Эти значения были заданы в качестве параметров эталонной
модели (3), (4).
. Эти значения были заданы в качестве параметров эталонной
модели (3), (4).
Время,
в течение которого осуществляется адаптация, назовем периодом адаптации. Период
адаптации начинается при нарушении условия (7) и заканчивается, если в течение ![]() условие (7)
выполняется. К сигналу ошибки на входе регулятора в процессе адаптации
добавляется гармонический испытательный сигнал
условие (7)
выполняется. К сигналу ошибки на входе регулятора в процессе адаптации
добавляется гармонический испытательный сигнал ![]() . Вне периода адаптации испытательный сигнал отключается,
а параметры регулятора фиксируются.
Модель в ПК "МВТУ" содержит также блоки, обеспечивающие в процессе
моделирования расчет и отображение годографа Найквиста, запаса устойчивости по
фазе и частоты среза.
. Вне периода адаптации испытательный сигнал отключается,
а параметры регулятора фиксируются.
Модель в ПК "МВТУ" содержит также блоки, обеспечивающие в процессе
моделирования расчет и отображение годографа Найквиста, запаса устойчивости по
фазе и частоты среза.
Моделирование
адаптивной системы показало, что период адаптации после изменения параметра k
объекта не превышает ![]() , а после окончания этого периода ошибка не превышает 0.011.
Эти показатели сохраняются при изменении k в широких пределах, даже
если система временно теряет устойчивость (например, при увеличении некоторых
значений в (6) на несколько порядков). Отметим, что многие другие адаптивные
регуляторы (в том числе и рассмотренный в [1]) не могут быть применены в такой
ситуации, поскольку для их успешной работы необходимо, чтобы система сохраняла
устойчивость при скачкообразных изменениях параметров объекта.
, а после окончания этого периода ошибка не превышает 0.011.
Эти показатели сохраняются при изменении k в широких пределах, даже
если система временно теряет устойчивость (например, при увеличении некоторых
значений в (6) на несколько порядков). Отметим, что многие другие адаптивные
регуляторы (в том числе и рассмотренный в [1]) не могут быть применены в такой
ситуации, поскольку для их успешной работы необходимо, чтобы система сохраняла
устойчивость при скачкообразных изменениях параметров объекта.
Литература
1.
Александров А.Г. Адаптивное управление объектом с запаздыванием // Труды
IX Международной Четаевской конференции "Аналитическая механика,
устойчивость и управление движением". – Иркутск, 2007. – Т. 3.
– С. 6‑13.
2.
Козлов О. С., Кондаков Д. Е.,
Скворцов Л.М. и др. Программный комплекс для исследования динамики и проектирования технических
систем // Информационные технологии. – 2005. – № 9. – С. 20–25.
3.
Козлов О.С.,
Кондаков Д.Е., Скворцов Л.М. и др. Программный комплекс "Моделирование в технических
устройствах". http://model.exponenta.ru/mvtu/20050615.html.
4.
Скворцов Л.М. Интерполяционные методы синтеза систем
управления // Проблемы управления и информатики. – 1998. – № 6. – С. 25–30.
5.
Скворцов Л.М. Интерполяционный метод автоматической настройки
регуляторов // Изв. РАН. Теория и системы управления. – 1998.
– № 6. – С. 100–103.