Универсальная программа расчёта конструкций методом
конечных элементов “Зенит-95”.
Опыт использования
Курков С.В.,
ген. дир., к.т.н., с.н.с., г.,
ООО “НТП “ДИП”, г. Санкт-Петербург,
Лянной Е.Г.,
зам. ген. дир.,
КБ “Арсенал” им. М.В.Фрунзе, ., г. Санкт-Петербург,
Гутовский И.Е.,
вед.инж.,
КБ “Арсенал” им. М.В.Фрунзе, г. Санкт-Петербург
Создание сложных
конструкций, к которым предъявляются жёсткие требования по прочности,
надёжности при одновременных весовых
ограничениях, предполагает выполнение разнообразных сложных и точных расчётов,
основанных на использовании подробных математических моделей. В этой связи, созданию программного обеспечения,
реализующего инженерные расчёты, во всём мире уделяется повышенное внимание. В
подавляющем большинстве случаев математической основой таких программ является
метод конечных элементов. Имеется ряд достаточно широко известных зарубежных
программ, реализующих широкий класс
задач. Однако, при всём многообразии решаемых этими программами
задач, практически в каждой отрасли,
имеются специфические особенности, требующие учёта и, следовательно, адаптации
программного обеспечения. Это требует контакта с разработчиками программ. Кроме
того, необходимость создания
отечественных программ очевидна, также, с экономической точки зрения.
Предлагаемая вниманию
читателя программа «Зенит-95» является полностью отечественной разработкой в
этой области. Цифры 95 в названии, обозначают год начала проекта. Программа аттестована в Госатомнадзоре РФ по задачам
расчёта напряжений и деформаций (аттестационный паспорт № 148 от 21.02.032 г)
и теплофизическим задачам (аттестационный
паспорт № 200 от 231.06.05 г). Требуемые
ОС - Windows-98/2000/XP.
К настоящему времени имеется значительный положительный
опыт эксплуатации программы на предприятиях
аэрокосмической, авиационной, судостроительной, машиностроительной, строительной отраслях, а также в области
атомного энергомашиностроения.
Программа
предназначена для решения следующих задач расчёта конструкций:
·
определение деформаций и напряжений при действии статических нагрузок (линейная и нелинейная статика);
·
анализ начальной устойчивости;
·
определение параметров движения, деформаций и напряжений при динамических переходных процессах (удары, действие
сейсмических нагрузок и т.п.) в линейной и нелинейной постановке;
·
расчет частот и
форм собственных колебаний;
·
расчёт реакций на сейсмические воздействия
линейно-спектральным методом;
·
расчет амплитуды вынужденных колебаний;
·
расчет параметры процессов теплопередачи при
стационарных и нестационарных процессах;
·
совместный расчёт температур и напряжений;
·
расчёт стационарных и нестационарных процессов течения
жидкости в трубопроводах и гидравлических системах;
·
расчёт отклика
на сейсмические воздействия;
·
анализ акустических полей;
·
определение инерционных характеристик.
Максимальный объём решаемых задач определяется
возможностями используемой техники. К настоящему моменту имеется опыт решения
задач для моделей, содержащих несколько миллионов узлов.
Программа имеет индивидуальные отличия как по
составу библиотеки элементов, так и,
практически, в каждой из реализуемых задач.
Решение систем
линейных алгебраических уравнений, используемое, практически, во всех
алгоритмах программы, возможно двумя методами – методом Гаусса и методом сопряжённых
градиентов.
Интегрирование
уравнений движения по времени при решении задач динамики выполняется прямым
интегрированием уравнений движения (метод нецентральных разностей третьего
порядка или метод прямоугольников с активным сглаживанием), что обеспечивает
подавление высокочастотных составляющих решения и позволяет выбирать шаг интегрирования
по времени исходя только из требуемой точности воспроизведения исследуемых
процессов не заботясь об устойчивости вычислений.
Моделируется поведение
изотропных, ортотропных и анизотропных материалов. Имеется возможность расчёта
армированных элементов конструкций.
Расчёт напряжений и
деформаций в модели для изотропных материалов может выполняться с учётом
геометрической и физической нелинейности.
Моделирование физически нелинейных свойств материала процессов
осуществляется в рамках теории пластического течения. Деформирование материала
рассматривается вплоть до разрушения, после чего, разрушенные элементы
исключаются из рассмотрения. Это позволяет моделировать аварийные ситуации.
Определение деформаций и
напряжений при действии статических
нагрузок может выполняться как для линейного случая, так и с учётом физической и геометрической нелинейности.
При этом можно задать варианты сочетаний нагрузок с последующей обработкой.
Одним из наиболее
важных отличий программы от аналогов является возможность моделирования
динамики систем, представляющих собой механизмы, т.е. системы, элементы которых
совершают большие пространственные кинематические перемещения и одновременно
испытывают упругие и пластические деформации. Теоретические вопросы построения
уравнений движения таких систем изложены в /2, 3 и др./. Следует сказать, что
при динамическом анализе для всех видов воздействий и кинематических возмущений
можно задать практически любой закон изменения во времени.
Геометрическая
нелинейность предполагает как учёт больших перемещений элементов модели
объекта, так и учёт изменения его структуры вследствие соударений звеньев,
разрушения элементов или появления новых элементов в модели. В качестве
примеров реализованных в программе задач, где необходимо учитывать появление
новых элементов, может служить задача моделирования процесса сварки, где по
мере прохождения подвижной тепловой нагрузки, имитирующей действие сварочной
дуги, появляются новые элементы, описывающие свойства сварного шва. Другой задачей, может служить задача
определения напряжений в процессе строительства железобетонных сооружений,
когда по мере нанесения новых слоёв бетона в ранее сформированных слоях
возникают начальные напряжения.
Расчёт частот и форм
собственных колебаний выполняется на основе известного метода итераций в подпространстве.
Расчёт отклика на
сейсмические воздействия может выполняться как линейно-спектральным методом,
так и динамическим, при котором рассматривается динамический процесс в конструкции,
вызванных действием синтезированных по заданным спектрам акселерограмм. Последнее важно для анализа нелинейных
систем, в которых присутствуют опоры с трением, неудерживающие связи,
контактные взаимодействия и т.п., так как расчёт для таких систем можно выполнить
только динамическим методом, т.е. прямым интегрированием уравнений движения.
Анализ акустических
полей ориентирован на решение задач дефектоскопии – поиска мест локализации
источников эмиссии (дефектов) и определения мест эффективного расположения
акустических датчиков. Для определения мест локализации источников эмиссии в
процессе разработки программы предложен и реализован метод временных диаграмм.
Сущность метода заключается в следующем. Для заданных точек расположения
акустических датчиков определяются временные диаграммы - узловые значения
времен достижения акустической волны при расположении источника в месте
расположения датчика. Затем, по
определённым экспериментально временным задержкам прихода сигнала к датчикам
определяется суммарная диаграмма, показывающая место наиболее вероятного
расположения источника. Метод имеет
определённые перспективы для создания систем безопасности, регистрирующих
акустические сигналы характерные для состояний предшествующих разрушению
элементов, или нехарактерных для нормальной работы объекта внешних воздействий.
При наличии модели объекта с временными диаграммами акустических датчиков метод позволяет быстро
определить положение источника сигнала.
Задачи расчёта
процессов теплопередачи и механики возможно решать как совместно, так и
последовательно, используя результаты расчёта температур в задачах расчёта напряжений
и деформаций. В последнем случае, поля температур, полученные в результате
расчёта тепловых процессов, автоматически используются для определения
температурных напряжений при расчёте напряжений и деформаций.
Возможность
совместного решения тепловых и механических задач особенно важна при
рассмотрении гидромеханических систем, в которых имеет место теплообмен между рабочей
жидкостью и стенками трубопроводов. Условия теплообмена зависят от скорости
движения жидкости. Вязкость жидкости, а,
следовательно, и скорость её движения, зависят от температуры. Это требует
совместного решения задач механики и теплофизики, что и реализовано в программе.
Библиотека элементов программы содержит следующие
группы конечных элементов:
·
объёмные конечные элементы;
·
пластины;
·
стержневые элементы;
·
контактные элементы;
·
элементы механизмов;
·
элементы гидравлических и пневматических схем;
·
логические
элементы систем автоматического управления;
·
виртуальные кинематические ограничения.
Объёмные,
стержневые конечные элементы, а также
пластины, отличаются от традиционных
тем, могут использоваться в
геометрически нелинейных задачах, а также тем, что при учёте физической
нелинейности позволяют учесть возможность разрушения элемента. Для
стержневых элементов обеспечена возможность расчет характеристик сечений для
произвольных сечений. Имеется, также, библиотека типовых сечений, в которую
входят стандартные профили и их сочетания.
Кроме того, стержневые
элементы трубчатого сечения позволяют производить расчёт деформаций и
напряжений с учётом действия внутреннего и внешнего давлений.
Библиотеки
элементарных механизмов (кулисный механизм, элемент с изменяемой длиной,
контактные точки и поверхности…), элементов гидро- и пневмоприводов (трубопроводы,
цилиндры,…), логических элементов систем
автоматического управления, а также виртуальные
кинематические ограничения выделяют программу из аналогов, значительно
расширяя класс моделируемых объектов. К последним относятся плоские,
цилиндрические, конические и сферические поверхности, ограничивающие
перемещения узловых точек при выполнении условий контакта. С точки зрения математической реализации, эти
элементы занимают промежуточное положение между контактными и редуцирующими
элементами. Их разновидностью являются связующие элементы, имитирующие
крепёжные элементы в сборках. На рис.1. представлен пример использования
виртуальных кинематических ограничений для моделирований крепёжных элементов
(шпилек и гаек) в модели фланцевого соединения. Использование элементов этой
группы позволяет значительно сократить число узлов и элементов модели при достаточно высоком уровне точности
моделирования, так как сохраняются
основные свойства элементов – учёт податливости резьбового соединения,
возможность контакта цилиндрической части шпильки с внутренней поверхностью
фланца и возможность учёта потери контакта на части поверхности гайки и фланца
при изгибе шпильки. Распределение напряжений и перемещений в области крепёжных
элементов в этом случае мало отличается от распределений, полученных на
подробной модели, в которой все крепёжные элементы представлены объёмными
конечными элементами.
При решении задач
распространения тепла можно задать следующие виды граничных условий:
·
источники
тепла;
·
конвективный
теплообмен;
·
теплообмен
излучением.
Эти
условия могут задаваться в узле, по линии и поверхности. Тепловыделение может
быть объёмным.
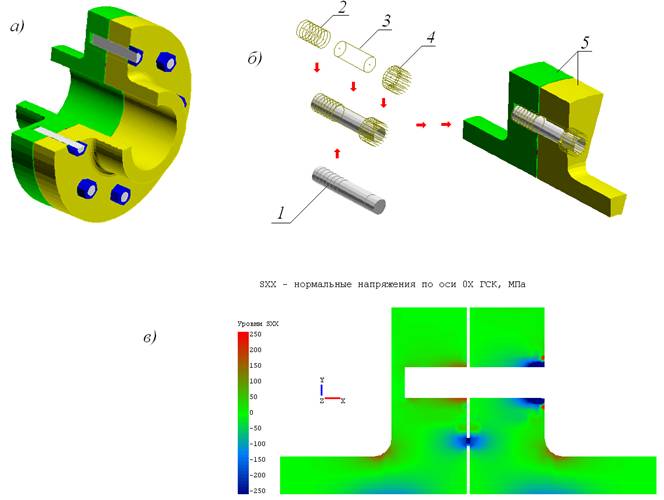
Рис.1.
Моделирование крепёжных элементов при расчёте фланцевого соединения: а –общий вид модели; б – моделирование шпильки и гайки; в –распределение напряжений вокруг
шпильки.
1 –
стержневые элементы; 2, 3 –цилиндрические
виртуальные кинематические ограничения; 4
– кольцевое виртуальное кинематическое ограничение; 5 -фланцы.
На
модель можно задать следующие виды механических нагрузок:
·
сосредоточенные
узловые силы и моменты;
·
погонные
(распределённые по длине) нагрузки;
·
давления:
·
распределённые
по массе силы;
·
силы
сопротивления движению;
·
подвижные
нагрузки;
·
силы взаимодействия с воздушной (ветер) и
водной средой (сила Архимеда, сопротивления движению, волновые нагрузки).
В качестве
кинематических граничных условий могут задаваться:
·
закрепления
по осям Декартовой и в цилиндрических системах координат;
·
узловые
перемещения, скорости и ускорения;
·
опоры
с трением.
Важным видом
кинематических граничных условий является возможность согласования сеток
элементов, построенных с разным шагом, или редуцирование – связь значений параметров
в редуцирующих и редуцируемых узлах. Полагается, что параметры (перемещения,
температуры…) редуцируемых узлов выражаются через параметры редуцирующих через
функции формы. Реализовано два основных
вида редуцирования – по линии и по поверхности. В первом случае редуцируемый
узел лежит на прямой между двумя редуцирующими узлами. Во втором – на
поверхности, ограниченной четырёхугольником с редуцирующими узлами в
вершинах. Этот тип условий позволяет
согласовывать сетки элементов с разным шагом без использования вырожденных конечных
элементов, а также стыковать элементы различных типов. Пример их использования
представлен на рис.2.
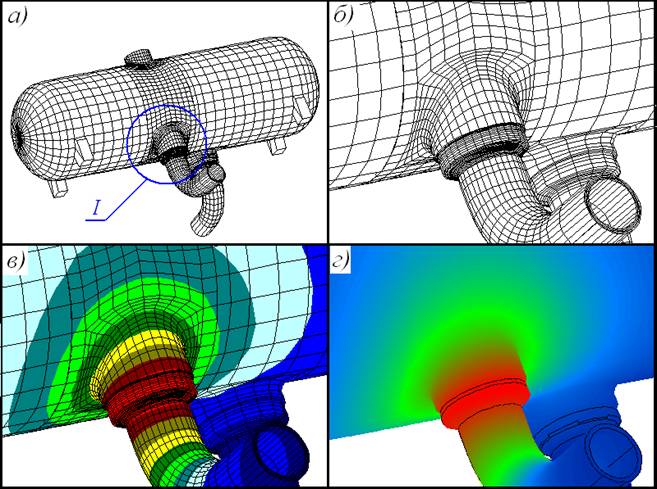
Рис.2.
Использование редуцирования при формировании моделей:
а - общий вид модели сосуда высокого давления; б- сетка
элементов вблизи концентратора напряжений (область I) с редуцированием узлов;
в и г - распределение
температур и деформаций вблизи концентратора напряжений.
Опытом установлено,
что в большинстве случаев редуцирование при сгущении сетки даёт гораздо лучший
с точки зрения точности и сходимости результат, чем использование вырожденных
(треугольных) элементов. В
представленных на рис.2в и г
картинах распределения температур и деформаций видно, что на границах
фрагментов, состыкованных с использованием редуцирования, отсутствуют
разрывы значений параметров.
Для задач определения деформаций и напряжений при
действии статических нагрузок обеспечена
возможность решения задач для вариантов сочетаний нагрузок, а также для нагрузок
изменяющихся во времени с последующей совместной обработкой результатов (выбор
экстремальных значений параметров по всем вариантам и пр.).
В программе имеется удобный
многофункциональный графический редактор, обеспечивающий возможность
эффективного построения моделей, состоящих как из дискретных, так и объёмных
элементов, позволяющий легко формировать объёмы и поверхности сложной формы,
включать в формируемую модель другие модели и выполнять множество операций
преобразования модели.
Библиотека параметризованных
фрагментов, имеющаяся в программе, обеспечивает возможность автоматизированного
формирования и включения в модель часто повторяющихся фрагментов, для которых
указываются конкретные геометрические параметры. На рис. 3 проиллюстрирована
последовательность формирования модели соединения трубопроводов из типовых
фрагментов – соединения и двух переходов.
Библиотека может пополняться
пользователем.
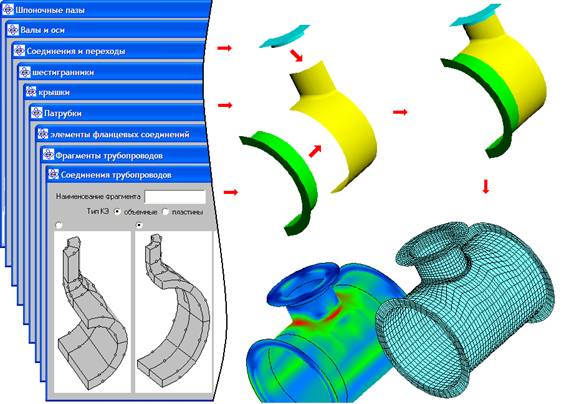
Рис.3. Формирование модели
соединения трубопроводов с использованием параметризованных фрагментов.
При использовании такого
способа формирования моделей возможность стыковки сеток редуцированием
предоставляет дополнительные преимущества, так как отпадает необходимость в
строгом согласовании сеток отдельных фрагментов.
Программа имеет стандартный
Windows-интерфейс: выведенная программой информация может экспортироваться в
другие Windows-программы (Word, Exel, Paint и др.).
Обеспечена возможность
импорта графических данных из AUTOCAD
(DXF - файлы), файлов STEP- и IGES- форматов, а также исходных
данных для программ ANSYS, COSMOS/M, NASTRAN.
Обеспечены самые
разнообразные возможности представления данных (отображение модели с учётом
подавления невидимых линий и освещённости, объёмного отображения стержневых
элементов и др.) и результатов расчётов (таблицы, графики, муаровые картинки, изображение
модели в исходном, смещённом и
деформированном состояниях, траектории движения узлов и элементов, анимация для
динамических процессов и пр.).
В КБ “Арсенал” им.
М.В.Фрунзе программа используется как для расчётов прочности, так и для
расчётов динамики раскрывающихся конструкций космических летательных аппаратов.
Один из примеров расчёта рассмотрен далее.
При осуществлении операции отделения космического
аппарата (КА) от разгонного блока (РБ), кроме требований надежного и
безотказного срабатывания всех элементов, осуществляющих отделение, должно быть
обеспечено выполнение целого ряда требований кинематического характера.
Отделение должно происходить безударно, т. е.
любые соприкосновения конструкции КА и РН после срабатывания системы отделения
недопустимы. Приращение угловой скорости КА за счет срабатывания системы
отделения должно быть минимальным.
И все же практика эксплуатации КА показывает, что
при разделении его угловая скорость может превысить допустимую. Например, это
произойдет при отказе одного из толкателей, осуществляющих отделение. В этом
случае, из-за действия недопустимых центробежных сил, может возникнуть
ситуация, которая повлечет за собой, либо нарушение конструктивной конфигурации
КА, либо нарушение конструктивной прочности некоторых его элементов, а именно
его раскрывающихся элементов (панелей солнечных батарей (ПСБ), антенн и
др.).
Необходимо отметить, что отказ в работе любого
элемента механической системы раскрытия или неправильный выбор их
кинематических или динамических параметров ведет либо к нарушению нормального
функционирования ЛА в целом, либо к невыполнению задачи.
В качестве примера можно привести процесс раскрытия
ПСБ. Как правило, на КА, исходя из симметрии его конструктивно-компоновочной
схемы, устанавливают две ПСБ. При определенной недопустимой величине
составляющей угловой скорости в плоскости раскрытия ПСБ, одна из панелей, ввиду
недостаточной энергетики привода для преодоления действующих на нее
центробежных сил, при раскрытии может не зафиксироваться в рабочем положении, а
противоположная панель, под действием тех же самых центробежных сил -
сломаться.
Определение параметров
движения КА при разделении, параметров движения его раскрывающихся элементов и
напряжений в них, возможно путем построения и исследования математической
модели объекта с использованием метода конечных элементов. Этот метод позволяет
максимально точно и подробно описать упругие характеристики конструкции. При
этом, для правильной оценки поведения конструкций КА при возникновении
вышеописанных ситуаций требуется решение совместных задач динамики
пространственного движения конструкции и ее упругих деформаций.
Рассматривается движение КА и РБ на ближнем участке
расхождения, т. е. на участке непосредственно срабатывания энергетических
средств, осуществляющих отделение. В большинстве случаев, в качестве таких
средств используются пружинные толкатели. При расчетах кривизной поля тяготения
можно пренебречь.
Сложности
моделирования объекта в данном случае обусловлены такими его особенностями, как
большие перемещения элементов, большие упругие деформации, малая жесткость
звеньев и необходимость моделирования специальных элементов, таких как элементы
приводов.
На рис.4 показано положение КЭМ КА-РБ при моделировании их разделения при
отказе одного из толкателей.
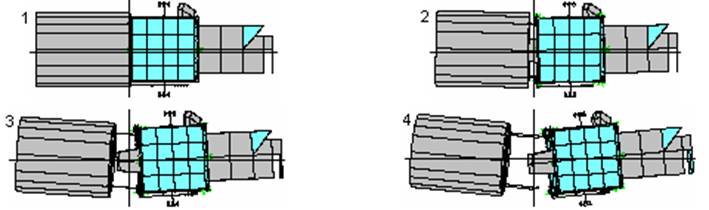
Рис.4.
Если в результате решения задачи оказывается, что
угловые возмущения КА превышают допустимые, то необходимо провести исследование
возможности ужесточения требований по точности установки толкателей, разбросу положения
центра масс КА и РБ, разбросу жесткости пружин, возможности снижения энергии
толкателей. Такие задачи решаются в каждом конкретном случае отдельно.
Основными
техническими требованиями к раскрывающимся элементам являются требования по
быстродействию срабатывания, перегрузкам в различных сечениях раскрывающихся
конструкций, угловым скоростям в момент фиксации в рабочем положении,
очередность фиксации в шарнирах.
Динамические
модели позволяют спрогнозировать возможные последствия аварийных ситуаций, возникающих
при разделении КА и РБ, которые могут отразиться на работоспособности
раскрывающихся элементов КА, а, следовательно, и на работоспособности всего
аппарата в целом.
На рис. 5 показано
положение КЭМ КА в процессе раскрытия ПСБ в различные моменты времени при
наличии у КА начальной угловой скорости.
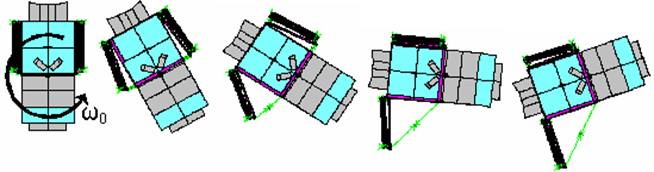
Рис. 5.
На
рис.6 приведены сравнительные графики параметров движения и напряжений в
корневых шарнирах левой и правой створок ПСБ при раскрытии КА при наличии у
него начальной угловой скорости.
Анализ предельных случаев, когда интересующие
исследователя критерии достигают экстремума, позволяет найти оптимальные
параметры системы.
Данный расчет позволил осуществить выбор типа и
характеристик привода раскрывающего ПСБ с учетом возможной недопустимой, но
вероятной начальной угловой скорости у КА.
Отработка
методики расчетов динамики КА выполнена на базе анализа конструкций,
разрабатываемых КБ «Арсенал».
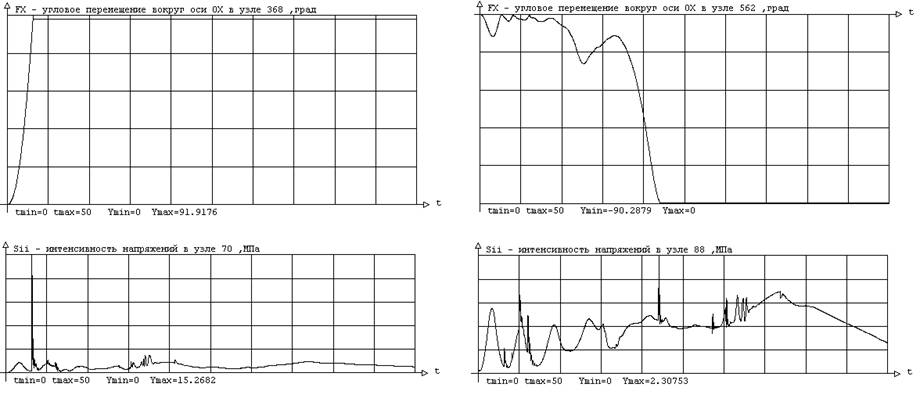
Рис. 6.
Литература
1.
Круглов Г.Е. Аналитическое проектирование механических систем.Учебное пособие. Самара: 2001.
2.
Курков С.В.Метод конечных элементов в задачах динамики механизмов и
приводов. -СПб.: Политехника, 1991.-224с.-ISBN 5-7325-0176-2.
3. Курков С.В. Применение
метода конечных элементов для динамического анализа геометрически нелинейных
систем. Математическое моделирование в механике сплошных сред на основе методов
граничных и конечных элементов: доклады XVII международной конференции.
Доклады. -СПб.: НИИХ СПбГУ, 1999.-324с.ISBN
5-7997-0159-3