Разработка
системы бесконтактных измерений для промышленного применения
В.А. Князь,
нач. сектора,
ФГУП «ГосНИИАС», г. Москва
В последнее время все большее применение в
процессах проектирования, создания и контроля новых образцов техники находят
системы бесконтактных измерений, основанные на различных физических принципах.
Среди них системы лазерной триангуляции, лазерной дальнометрии, фотограмметрические
системы и другие. Фотограмметрические системы, основанные на методах обработки
изображений, имеют значительный потенциал с точки зрения применения для целей
множественного измерения трехмерных координат поверхности объекта вследствие
большого объема информации об объекте, содержащегося в изображениях и возможности
применения интеллектуальных методов обработки изображений, позволяющих автоматически
детектировать заданные структуры и с высокой точностью определить координаты их
характерных точек.
Для определения трехмерных координат точки
фотограмметрическими методами необходимо иметь два или более разноракурсных
снимка объекта, на которых присутствует данная точка, и идентифицировать
измеряемую точку на изображениях и определить ее пиксельные координаты. Далее,
если определены модели камер и их положение в некоторой заданной системе
координат (так называемое внутренне и внешнее ориентирование камер), трехмерные
координаты заданной точки определяются из условий коллинеарности, отражающих
тот факт, что заданная точка объекта, центр проектирования и изображение данной
точки объекта лежат на одной прямой. Обработка изображений позволяет получить
координаты множества точек объекта, видимых одновременно как минимум с двух
камер – так называемое «облако точек». Для построения модели объекта необходимо
решить задачу восстановления формы поверхности. Реальные объекты, для которых
необходимо построить 3D модель, имеют сложную
форму, такую, что условие наблюдаемости двумя камерами для двухкамерной
стереосистемы выполняется не для всех значимых точек поверхности. В этом случае,
чтобы измерить все значимые точки и построить полную 3D модель, либо необходимо
использовать большее количество камер и строить многокамерную фотограмметрическую
сеть, обеспечивающую выполнение условия наблюдаемости, либо использовать
двухкамерную стереосистему для получения частных облаков точек, описывающих
форму фрагментов поверхности объектов и затем объединять частные фрагменты в
единую модель. Второй подход видится более универсальным и предпочтительным,
поскольку, в этом случае, созданная измерительная система может быть
использована для различных объектов, в то время как фотограмметрическая сеть
должна конструироваться, вообще говоря, для каждого объекта заново.
Таким образом, для построения системы бесконтактных
измерений для промышленного применения, необходимо решить следующие задачи:
- определение адекватной
модели получения изображений (калибровка камер);
- определение положение
съемочной системы в заданной системе координат;
- автоматическое
стереоотождествление измеряемых точек поверхности объекта;
- высокоточное определение
координат соответственных точек на изображениях;
- расчет трехмерных координат
и восстановление формы поверхности объекта;
- построение полной
трехмерной модели объекта.
В общем случае, фотограмметрическая (или
видеометрическая) система бесконтактных измерений включает две (или более)
камер (видеокамер), средства оцифровки и ввода изображений в компьютер,
средства подсвета объекта, компьютер, решающий задачи обработки изображений и
расчета трехмерных координат.


а б
Рис. 1. Видеометрические комплексы
Для промышленного применения целесообразно
использовать в качестве устройств получения изображений видеокамеры, поскольку
это позволяет обеспечивать высокую степень автоматизации системы и возможность
работы в реальном времени. На Рис. 1 представлены разработанные видеометрические
комплексы бесконтактных измерений. Рис. 1а представляет мобильный вариант комплекса,
включающий две монохромные камеры для расчета трехмерных координат, цветную
камеру для текстурирования полученных 3D моделей и мультимедийный
проектор структурированного света. На Рис 1б показан комплекс получения полных
трехмерных моделей на базе четырех монохромных видеокамер, двух проекторов
структурированного света и прецизионного поворотного устройства
позиционирования.
1. Калибровка
Традиционно задачи калибровки и ориентирования, то
есть задачи определения неизвестных параметров модели камеры и оценки ее
пространственного положения в некоторой заданной системе координат, решается
методом наименьших квадратов как задача оценки неизвестных параметров по
наблюдениям. В качестве наблюдаемой сцены используется специальный тестовый
сюжет, трехмерные координаты набора опорных точек которого априорно известны.
Наблюдениями являются координаты опорных точек на изображениях. Для обеспечения
точности и статистической достоверности оценки неизвестных параметров
необходимо провести большое количество измерений (до десятков тысяч), что в
ручном варианте является весьма трудоемкой задачей и существенно снижает
эффективность применения фотограмметрической системы в промышленных
приложениях.
Для решения данной проблемы разработаны методы
автоматизации процедур калибровки, основанные на применении оригинальных кодированных
меток [1] и метода оценки начального приближения параметров ориентирования [2].
Кодированные метки, обеспечивают автоматическую
идентификацию метки на изображении и субпиксельное высокоточное измерение
координат центра метки. Структура меток обусловливает высокую робастность
детектирования и идентификации на сложноструктурированном фоне при значительных
углах поворота метки (до 45°), инвариантность к
вращению, большую глубину кода.
Вид кодированной метки и изображение тестового поля
с распознанными метками представлены на Рис. 1.
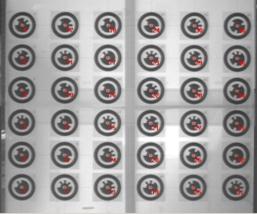
Рис. 1.
Кодированная метка и тестовое поле для калибровки
Применение кодированных меток в задачах
ориентирования позволяет полностью автоматизировать процесс калибровки и
значительно повышает точность системы бесконтактных измерений. Время,
необходимое для проведения калибровки и ориентирования в автоматическом режиме
на два порядка меньше времени, требующегося для ручной процедуры; точность
оценки неизвестных параметров на 20% выше результатов ручной обработки.
2. Стереоотождествление
Стереоотождествление является ключевой проблемой
при решении задачи расчета трехмерных координат объекта фотограмметрическими
методами. В случае промышленной системы измерения трехмерных координат данная
процедура должна выполняться в автоматическом режиме и обеспечивать высокую
точность определения координат. Для задачи измерения трехмерных координат в
отдельных точках данные требования обеспечивают кодированные метки. Однако
задача расчета координат поверхности объекта с высокой плотностью измерений
(сканирования поверхности) требует разработки специальных методов
множественного стереосопоставления точек изображений.
Для решения задачи стереоотождествления при
восстановлении формы поверхности промышленных объектов, не имеющих собственной
информативной текстуры, применяется специальный структурированный подсвет
объекта. Используемая структура подсвета ориентирована на метод сопоставления
соответственных точек. Разработаны методы стереотождествления на основе:
а) контрастных точечных меток, для случая системы
включающей более двух камер,
б) корреляционного анализа стереоизображений,
снятых в структурированном свете в форме случайных мозаик,
в) множественных контрастных полос, с кодированием
для автоматической идентификации,
г) сканирующей контрастной полосы на базе
ПК-управляемого устройства перемещения светового шаблона или мультимедийного
проектора.
|
|
|
|
|
а |
б |
в |
|
|
||
|
г |
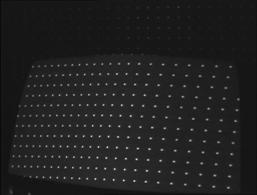
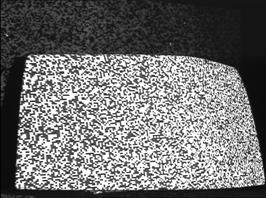

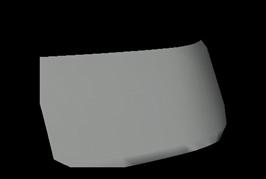
Рис. 2.
Снимки объекта в различных шаблонах структурированного света (а,б,в) и полученная 3D модель (г)
3. Построение 3D моделей
Результатом решения задачи стереоотождествления и
расчета трехмерных координат соответственных точек является 3D
массив точек наблюдаемой области поверхности объекта («облако точек»). В случае сложной формы объекта, необходимо
получить набор таких «облаков», покрывающих всю поверхность объекта, причем каждое
«облако», задано в своей локальной
системе координат. Данные массивы, вообще говоря, уже могут являться входной
информацией систему автоматизированного проектирования для последующей
обработки с целью построения модели поверхности объекта или его твердотельной
модели.
Однако в большом числе случаев, предпочтительно
получить на входе CAD/CAM системы уже модель
поверхности объекта или его твердотельную модель. Разработанное программное
обеспечение решает также задачу построения модели поверхности объекта по его
«облаку точек» на основе триангуляции Делоне, задачу приведения всех частных
фрагментов объекта («сканов») в единую глобальную систему координат, построения
твердотельной модели объекта для последующего решения задачи создания копии CAM системой
[3].
Решение задачи объединения «сканов» в единую модель
разработано в различных вариантах: на основе построения сети опорных точек [4],
по набору соответственных точек перекрывающихся участков смежных фрагментов
[5], с использованием информации от прецизионного устройства позиционирования
[6], на основе корреляционного анализа
смежных областей фрагментов.
На Рис. представлены результаты 3D реконструкции
пластилиновой модели элемента внутренней отделки автомобиля методом построения
фотограмметрической сети опорных точек.

а б в
Рис. 3. Результаты пофрагментной 3D реконструкции пластилиновой
модели
Рис.4а представляет результаты сканирования и
приведения в единую систему координат трех фрагментов гребного винта методом
сопоставления набора соответственных точек. На Рис 4б представлены результаты
объединения 8 фрагментов авиационной детали и ее сравнения с исходной CAD моделью.
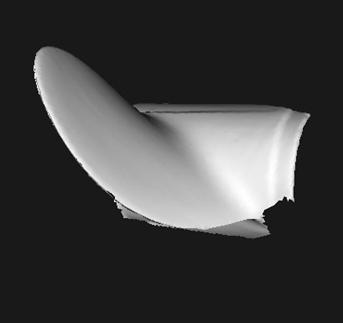
а б
Рис. 4. Результаты 3D
реконструкции деталей
Построение полной модели выполнено методом
сканирования фрагментов с последующим объединением фрагментов в единую модель
по сети опорных точек. Рис. а представляет пластилиновую модель с сетью опорных
точек, маркированных кодированными метками, на Рис. б показан один из отсканированных фрагментов и на Рис. в - полная модель, состоящая из 25 фрагментов.
Заключение
Рассмотрены основные проблемы, возникающие при
создании систем бесконтактных измерений, построенных на фотограмметрических
методах 3D реконструкции. Представлены методы решения
сформулированных проблем, таких как автоматическая калибровка системы,
выполнение автоматических высокоточных измерений, построение трехмерных моделей
для передачи в CAD/CAM системы. Разработанные
методы и их аппаратно-программная реализация в комплексах бесконтактных измерений
подтверждают целесообразность применения видеометрических систем в промышленных
приложениях, таких как обратный инжиниринг, быстрое прототипирование, контроль
качества изготовления.
Литература
1.
Knyaz V.A., Sibiryakov A.V., The Development of New
Coded Targets for Automated point Identification and Non-contact 3D Surface
Measurements, International Archives of Photogrammetry and Remote Sensing, Vol.
XXXII, part 5, Hakodate, Japan, 1998, pp. 80-85.
2.
Knyaz V.A., Zheltov S.YU., Stepanyants D.G., 2001.
Automated photogrammetric system for photorealistic skull 3D reconstruction.
Videometrics and Optical Methods for 3D Shape Measurements. Proceeding of SPIE,
Vol. 4309, 2001, pp. 336-345.
3.
Knyaz V.A., Photogrammetry for rapid prototyping:
development of non-contact 3D reconstruction technologies. Proceeding of SPIE,
Vol. 4464, 2001, pp. 437-445.
4.
Knyaz V.A., Stepanyantc D.G., PC-Based Digital
Close-Range Photogrammetric System for Rapid 3D Data Input in Cad Systems,
International Archives of Photogrammetry and Remote Sensing, Vol. XXXIII, part
B5/2, Amsterdam, The Netherlands, 2000, pp. 756-763.
5. Князь В.А., Амелин В.В. Объединение фрагментов
трехмерной модели объекта. Материалы 12 Международной Конференции по
Компьютерной Графике и Машинному Зрению Графикон’2002, Нижний Новгород, 16-21
сентября 2002 г., стр. 99-103.
6. Князь В.А. Фотограмметрический метод оценки положения
осей вращения прецизионных динамических стендов. Материалы Четвертой
научно-практической конференции «Современные проблемы фотограмметрии и
дистанционного зондирования». РОФДЗ,
Москва, 28-29 октября 2003, сс. 23-24.