Оптимальное управление технологическими
объектами в пространстве состояний
в формате время-частотных
распределений
Д.Б. Федосенков,
к..т.н.,
СГК, г. Москва,
М.Х. Дорри,
проф., д.т.н.,
ИПУ РАН, г. Москва,
А.А. Симикова,
асп.,
Б.А. Федосенков,
проф., д.т.н.rafwavelet@ngs.ru,
КемТИПП, г. Кемерово
Рассмотрен метод оптимального управления
разнохарактерными технологическими
объектами в среде пространства состояний,
представленной в виде время-частотных
отображений (карт). Анализируемый технологический объект представляет собой
смесеприготовительный агрегат для производства дисперсных смесевых композиций.
Автоматизированная система управления сформирована
на базе способа преобразования подобия, что позволяет исключить использование
редуцированных наблюдателей переменных состояния.
В представленной системе используются так
называемые распределения класса Коэна - для индикации с их помощью сигналов
текущих материалопотоков. Эта особенность делает
систему управления эффективной, а с точки зрения пользователя - более
информативной и семантически ясной.
The
method of optimal controlling various objects of technology in the state
space medium formatted as TFD (time-frequency distributions) images (maps) are
considered. The technological plant analyzed is a mixture producing aggregate
for manufacturing disperse mixed compositions.
The
computer-aided control system is formed on the basis of using a technique of
similarity transformation, the latter allows to deal
with no any state variables reduced order estimators.
The
system worked out uses the so-called Cohen's class distributions to indicate with their help current materials
flows signals, and this feature makes the control system effective and from the
point of operator's view - transparent and more informative in its semantic
essence.
Рассматривается линейная стационарная система,
описывающая процесс мультидозирования в
соответствующем блоке смесеприготовительного агрегата, динамика которого имеет
вид
x(t)=Ax(t)+Bu(t),
y(t)=Cx(t)+Du(t), x(t0)=x0
Система строго каузальна поэтому матрица выхода по управлению D=0.
Здесь x(t)![]() Rn – вектор переменных состояния (ВПС); u(t)
Rn – вектор переменных состояния (ВПС); u(t)![]() Rm – вектор управления; y(t)
Rm – вектор управления; y(t)![]() Rr – вектор выхода; x0
Rr – вектор выхода; x0![]() Rn - ВПС в момент времени t=t0; A,B,C – матрицы размерностей (n×n), (n×m), (r×n).
Rn - ВПС в момент времени t=t0; A,B,C – матрицы размерностей (n×n), (n×m), (r×n).
Ставится задача перевести систему мультидозирования из начального состояния x0 в минимально возможное
состояние за время в интервале ![]() , без затраты чрезмерно
больших управляющих воздействий u(t) для достижения этой цели.
Тогда задача оптимального регулятора (линейного квадратичного регулятора - ЛКР)
формулируется как задача определения оптимального закона управления
, без затраты чрезмерно
больших управляющих воздействий u(t) для достижения этой цели.
Тогда задача оптимального регулятора (линейного квадратичного регулятора - ЛКР)
формулируется как задача определения оптимального закона управления ![]() на интервале
на интервале ![]() , при котором будет
минимизирован следующий критерий оптимизации J:
, при котором будет
минимизирован следующий критерий оптимизации J:
 ,
,
где ![]() и
и ![]() – симметричные неотрицательно определенные
матрицы (соответственно матрицы веса интегральных квадратичных оценок качества
при векторах текущего
– симметричные неотрицательно определенные
матрицы (соответственно матрицы веса интегральных квадратичных оценок качества
при векторах текущего![]() и
конечного
и
конечного ![]() состояния процесса
дозирования, а
состояния процесса
дозирования, а ![]() – симметричная положительно определенная
матрица, отражающая вклад каждой скалярной компоненты вектора управления u(t) в
критерий оптимальности. Иными словами, решается так называемая задача Больца
[1], то есть фактически, в статье дается решение задачи целенаправленной смены
закона оптимального управления в ответ на обнаруживаемый в ходе текущего мониторирования эффект изменения комплекса характеристик материалопотока на выходе j-го дозатора или на выходе узла
суммирования материалопотоков дозирования.
Включение в структуру оптимальной системы управления блока
оценки неравномерностей материалопотока в
смесеприготовительном агрегате позволит осуществлять оптимальное управление
смесеприготовительными процессами в пространстве состояний с использованием
текущего мониторирования в вейвлет-среде.
– симметричная положительно определенная
матрица, отражающая вклад каждой скалярной компоненты вектора управления u(t) в
критерий оптимальности. Иными словами, решается так называемая задача Больца
[1], то есть фактически, в статье дается решение задачи целенаправленной смены
закона оптимального управления в ответ на обнаруживаемый в ходе текущего мониторирования эффект изменения комплекса характеристик материалопотока на выходе j-го дозатора или на выходе узла
суммирования материалопотоков дозирования.
Включение в структуру оптимальной системы управления блока
оценки неравномерностей материалопотока в
смесеприготовительном агрегате позволит осуществлять оптимальное управление
смесеприготовительными процессами в пространстве состояний с использованием
текущего мониторирования в вейвлет-среде.
При этом 1D-материалопотоковые
сигналы, формируемые первичными преобразователями (тензометрическими и
пьезоэлектрическими датчиками), преобразуются средствами вейвлет-трансформаций
в многомерные сосредоточенные переменные в виде время-частотных распределений класса Коэна [2]. Таким
образом закон управления по полному вектору состояния,
записанному в формате упомянутых распределений, будет выглядеть так
![]() ,
,
где dim![]() ), t – текущее время, w –
мгновенная угловая частота атомов время-частотного
распределения, а уравнения состояния и выхода для каузальных систем запишутся
соответственно
), t – текущее время, w –
мгновенная угловая частота атомов время-частотного
распределения, а уравнения состояния и выхода для каузальных систем запишутся
соответственно

![]()
Учитывая, что ряд переменных состояния (ПС)
невозможно регистрировать технически, было решено формировать альтернативные
векторы переменных состояния (ВПС) на основе способа преобразования подобия.
При этом матрицы состояния, управления и выхода по состоянию изменяются в
соответствии с выражениями
![]()
![]()
Отметим, что альтернативный вектор формируется в
зависимости от возможностей/невозможностей его регистрации и ряда режимно-конструктивных параметров блока дозирования. В
частности, здесь описан сформированный альтернативный ВПС, отражающий процесс мультидозирования в блоке, включающем дозатор дискретного
действия и два дозатора непрерывного действия. Скалярные компоненты
альтернативного вектора формировались в виде линейных комбинаций исходного
вектора, причем, в состав нового ВПС входили только реальные сигнальные
компоненты – виртуальные ПС исходного вектора, возникавшие при представлении
сигнала дозатора дискретного действия в виде Фурье-модели, не учитывались. Следовательно,
при использовании в задаче нового альтернативного ВПС и формировании из него
сигнала управления по полному вектору обратной связи по состоянию отпадала
необходимость в использовании редуцированных наблюдателей, что значительно
упрощало структуру системы управления. Например, процесс дозирования
многокомпонентным блоком описывался векторно-матричной моделью 17-го порядка, а
процедура обращения матрицы перехода от исходного вектора состояния к альтернативному реализовывалась в пакете MathCad.
Оптимизация стационарной
системы дозирования по квадратичным интегральным оценкам качества выполнялась в
соответствии с критерием оптимальности, записываемому в виде квадратичной формы
![]() =J (функции
Беллмана), в которой симметричная матрица
=J (функции
Беллмана), в которой симметричная матрица ![]() определяется в ходе решения матричного
дифференциального уравнения Риккати; при этом
квадратичная форма с матрицей
определяется в ходе решения матричного
дифференциального уравнения Риккати; при этом
квадратичная форма с матрицей ![]() может записываться в виде
функционалов Больца и Лагранжа [1].
может записываться в виде
функционалов Больца и Лагранжа [1].
Итак, при критерии оптимальности в форме Лагранжа
функционал имеет вид:
![]() (1)
(1)
Под интегралом- 2 квадратичные формы:
1) квадратичная форма состояния системы ![]() с положительно определенной
симметричной матрицей Q, dimQ=(n x n);
с положительно определенной
симметричной матрицей Q, dimQ=(n x n);
2)
квадратичная форма управления ![]() с положительно определенной симметричной
матрицей R, dimR=(m x m). Требуется найти оптимальное управление с ОС,
переводящее систему из произвольной начальной точки
с положительно определенной симметричной
матрицей R, dimR=(m x m). Требуется найти оптимальное управление с ОС,
переводящее систему из произвольной начальной точки ![]() =
=![]() 0 в конечную точку
0 в конечную точку ![]() (∞)=0 и обеспечивающее min функционала
(1).
(∞)=0 и обеспечивающее min функционала
(1).
Таким образом, алгоритм синтеза стационарного
линейного регулятора состояния для процессов дозирования выглядит так.
В исходных данных должны быть заданы следующие
условия:
·
уравнение состояния системы (или непосредственно
матрицы А и В для блока мультидозирования);
·
целевой функционал J (т.е. критерий оптимальности) в такой
форме:
![]() .
.
Функционал J и две подынтегральные квадратичные
формы суть скалярные функции.
1. Определяем
матрицу Q
из
квадратичной формы ![]() ,
выполняя операции умножения матрицы Q
с векторами распределений Коэна и сравнивая полученный результат с формой
заданного функционала J.
,
выполняя операции умножения матрицы Q
с векторами распределений Коэна и сравнивая полученный результат с формой
заданного функционала J.
2. Аналогичным
образом определяем матрицу веса R
в квадратичной форме управления.
3. Следующий
этап – определение элементов матрицы ![]() ,
входящей в состав квадратичной формы в виде функции Беллмана
,
входящей в состав квадратичной формы в виде функции Беллмана ![]() ,
из алгебраического уравнения Риккати [1]
,
из алгебраического уравнения Риккати [1]
![]()
Выполняя операции умножения матриц и, в
конечном счете, операции сложения, получаем равенство вида
![]() ,
,
dim
z=(n x n), dim 0=(n x n).
Из последнего матричного равенства
записываем n2
однородных
уравнений, и, решая их совместно, определяем коэффициенты kij
матрицы![]() ;
;
4. Проверяем
элементы kij
матрицы ![]() на положительную определенность по критерию Сильвестра [1], и, в соответствии с критерием, определяем
истинные значения коэффицентов kij.
на положительную определенность по критерию Сильвестра [1], и, в соответствии с критерием, определяем
истинные значения коэффицентов kij.
5. Записываем
оптимальный закон управления, подставляя найденные коэффициенты kij
в
выражение
![]() .
.
6. Для
получения графического представления оптимального закона управления u*(t), нужно определить все ПС в формате
распределений Коэна, входящие в закон оптимального управления. Расчет ПС
осуществляется по скалярным уравнениям состояния с ПС в виде время-частотных распределений с
учетом матриц A
и B блока дозирования.
Для минимизации функционала J в расчетах
использовались (как было указано выше) мультимерные
сосредоточенные переменные в виде время-частотных
распределений класса Коэна ![]() (в нашем случае – распределения Вигнера и
Чуи-Уилльямса [2]).
(в нашем случае – распределения Вигнера и
Чуи-Уилльямса [2]).
В тех случаях, когда модель процесса
характеризуется передаточной функцией, имеющей вид рациональной функции с
наличием нулей, следует прибегнуть к фрагментации модели на полюсо- и нульсодержащие
части, при этом в полюсосодержащей части (в бездифференцильном фрагменте схемы) векторно-матричная
модель системы мультидозирования может описываться
как по Фробениусу, так и с помощью преобразования подобия с использованием
реальных сигналов, регистрируемых измерительными преобразователями. Необходимость
подобной процедуры возникает при анализе процессов дозирования, когда один или
несколько дозаторов работают в порционном (дискретном) режиме, причем, описание
сигналов материалопотоковых расходов выполняется на
основе Фурье-моделей.
Использование результатов
текущего мониторирования материалопотоковых
сигналов с синхронной визуализацией их в виде время-частотных
распределений (время-частотных карт подконтрольных
процессов) позволяет эффективно управлять и контролировать на диспетчерском
уровне процессы, протекающие в отдельных фрагментах смесеприготовительного
агрегата, а формирование оптимального закона управления в формате время-частотных распределений, регистрируемых в вейвлет-среде и используемых вместо одномерных ПС,
способствует улучшению качества переходных процессов в подсистемах мультидозирования, перемещения ингредиентных субстанций внутри
производственного пространства и смесительного устройства при перестройке их
режимов работы.
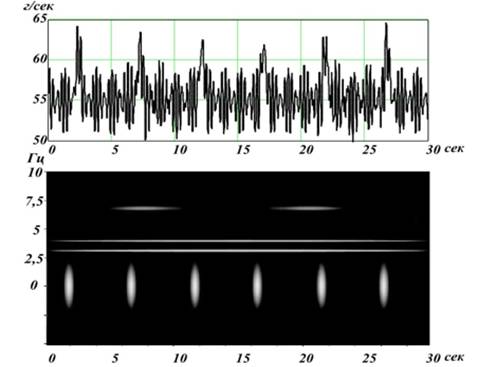
рис. 1. Отображение
установившегося процесса дозирования в виде распределений Вигнера
на выходе блока дозаторов
В качестве примера текущей регистрации (осуществляемой
синхронно с функцией управления) материальных потоков в блоке мультидозирования смесительного агрегата на рис.1
представлено отображение установившегося процесса дозирования в виде
распределений Вигнера на выходе блока дозаторов. Последний состоит из одного порционного, двух спиральных,
работающих непрерывно, с рабочими частотами 0,20Гц, 3,23Гц и 4,02Гц и спирального
дозатора, функционирующего дискретно во времени с центральной частотой
заполнения спектра 6,89Гц и частотой формирования доз 0,077Гц. Таким
образом, реализация совместной с процессом управления процедуры синхронного мониторирования процессов дозирования в вейвлет-среде
делает систему автоматического управления эффективной, а с точки зрения
пользователя – более информативной в отношении семантики протекающих в агрегате
процессов.
Литература
1. Ким, Д.П. Теория
автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и
адаптивные системы: учебное пособие / Д.П. Ким. – М.: Физматлит,
2004. – 464 с.
2. Cohen, L. Time-frequency Analysis / L. Cohen. - Englewood's Cliffs:
Prentice Hall, 1995.