Моделирование
и построение коммуникационного канала взаимодействия ядра системы ЧПУ
с программно-реализованным контроллером
Г.М.
Мартинов,
д.т.н.,
проф.,
А.Б.
Любимов,
вед.инж.,
ljubimov@ncsystems.ru,
Е.В. Саламатин,
зав. лаб.,
salamatin@ncsystems.ru,
С.В. Богданов,
магистр, bogservi@mail.ru,
МГТУ "СТАНКИН", г. Москва
Статья посвящена моделированию и разработке
универсального набора подключаемых программных библиотек на стороне
программно-реализованного контроллера для построения и отладки двунаправленного
коммуникационного канала взаимодействия ядра системы управления с устройствами
электроавтоматики. Обоснована актуальность решения коммуникационной задачи для
программно-реализованного контроллера и выполнено описание архитектуры канала
взаимодействия. Практическое использование разработанного канала взаимодействия
реализовано в
электроавтоматике станка силового строгания Э7106МФ.
The
article is devoted to modeling and development of a universal set of dynamically
linked program libraries on the side of software-based controller for implementing
and debugging a bidirectional communication channel of interaction between the
kernel of numerical control system and electrical automation devices. The relevance
of solving the communication task for software-based controller is
substantiated and an architectural description of the interaction channel was
made. Developed interaction channel is practically used in electrical automation
of E7106MF power planing machine.
При решении логической задачи системы управления в
большинстве случаев используются специализированные физические устройства – программируемые
логические контроллеры (ПЛК). Под ПЛК подразумевают программно-управляемый дискретный
автомат, имеющий некоторое множество входов, подключенных при помощи датчиков к
выходам объекта управления, и множество выходов, подключенных к исполнительным
устройствам. ПЛК контролирует состояние выходов объекта управления и при их изменении
отрабатывает определенные последовательности программно-заданных действий,
отражающихся в изменении состояния выходов контроллера. Существенным недостатком
такого подхода решения логической задачи является необходимость проектирования
и построения уникальной архитектуры для каждого отдельного случая и зависимость
от номенклатуры существующих на рынке ПЛК.
Альтернативным решением является использование
специализированных программных средств, осуществляющих весь перечень необходимых
функциональных возможностей, – программно-реализованного контроллера (Soft PLC). Такой подход позволяет существенно повысить
гибкость системы и облегчить процесс программирования ПЛК. Однако вопрос
взаимодействия ядра системы управления (СЧПУ) и программируемого логического контроллера
остается открытым, а при использовании Soft PLC
требует новых решений, позволяющих обращение к разделяемому пространству памяти.[1,4]
Целью работы является моделирование и разработка
набора подключаемых программных библиотек функциональных блоков на стороне Soft
PLC для построения и отладки двунаправленного канала взаимодействия ЧПУ – ПЛК[1].
Взаимодействие
ПЛК и ЧПУ
рис. 1 Диаграмма последовательности взаимодействия
ЧПУ – Soft PLC
При детальном рассмотрении процесс взаимодействия
ядра системы управления с программно-реализованным логическим контроллером мало
чем отличается от взаимодействия с обособленным физическим ПЛК. Этот процесс
включает в себя: предварительную установку соединения; согласование параметров
(например, списка подключенных устройств); формирование и отправку основного
пакета данных; обработку результатов (рис.
1). [2]
Таким образом, для подключения и осуществления
работы с Soft PLC требуется внести
минимальные изменения в ядро системы управления.
Набор
модулей канала взаимодействия
С целью оптимизации взаимодействия структура пакета
данных основана на модульной архитектуре. Весь набор объектов управления разбит
на специализированные модули. Список базовых абстракций объектов представлен в Таблице 1. Каждый модуль содержит информацию только об одном
объекте управления, а количество таких объектов, а значит и модулей,
регламентирует ядро системы управления.
Таблица 1
Набор составных модулей канала взаимодействия
|
Название модуля |
Описание |
|
Globals |
Глобальные сигналы о
готовности подсистем ЧПУ и ПЛК или наличие критических ошибок |
|
Channel |
Сигналы состояния и
управления каналами системы ЧПУ |
|
Axis |
Сигналы состояния и
управления осями системы ЧПУ |
|
Spindle |
Сигналы состояния и
управления шпинделями системы ЧПУ |
|
Tools Set |
Сигналы состояния и
управления механизмами смены инструментов |
|
Gearbox |
Сигналы состояния и
управления коробками скоростей и подач |
|
M_Function |
Сигналы состояния и управления
М-командами системы ЧПУ |
|
PLC Messages |
Сигналы для установки
сообщений ПЛК, отображения текущего состояния электроавтоматики станка |
|
Panel Keys |
Сигналы нажатия клавиш
кнопочной панели ПЛК и их подсветки |
|
Values Blocks |
Блоки данных системы ЧПУ
для передачи значений в ПЛК |
Представленный подход к составлению пакета предоставляет
возможность отказаться от циклической пересылки повторяющихся данных. При
формировании пакета на отправку в него попадают только те данные, которые
требуют обновлений, остальные игнорируются. Эта возможность позволяет сделать
обмен информацией между системой управления и устройствами электроавтоматики
более динамичным. Расшифровка такого пакета будет осуществляться путем последовательного
считывания данных при помощи полученных в начальных байтах смещений до каждого
из представленных модулей. Используемый подход построения канала взаимодействия
позволяет варьировать количество модулей данных не выходя за рамки стандартизированных
протоколов обмена. [3]
Набор
функциональный блоков канала ЧПУ-ПЛК
Для предоставления возможности использования
описанного выше канала взаимодействия средствами программно-реализованного
контроллера был спроектирован и реализован специализированный набор пользовательских
библиотек в редакторе управляющих программ Soft PLC (рис. 2).
рис. 2 Набор
пользовательских библиотек для Soft PLC
С учетом
особенностей программирования Soft PLC
каждый из модулей объектов управления был разбит на два потока: i****
– это поток данных из ядра системы управления в ПЛК (входной для контроллера,
например, iMCommand), а q**** – поток данных из ПЛК в
ядро системы управления (выходной для контроллера, например, qMCommand).
В качестве наглядного примера использования описываемого инструментария
разберем подробнее выполнение стандартных М-команд, к которым можно отнести смену
инструмента, установку и снятие тормозов у осей и др. (рис. 3).
рис. 3
Циклограмма выполнения М-команды с использованием функциональных блоков iMCommand и qMCommand
Логика выполнения фаз, показанных на Рис. 3, заключается в следующем:
1. Ядро СЧПУ
устанавливает сигнал активации активности М-команды и с помощью функционального
блока (ФБ) iMCommand передает его в Soft PLC.
2. Получив
сигнал, Soft PLC выполняет логику М-команды
(например, разблокирует ось гидравликой станка, выполняет автоматическую смену
инструмента и пр.). Ядро системы ожидает ответа от SoftPLC в рамках установленного в
конфигурации М-команды таймаута (т.е. времени, отведенного на ее выполнение).
При успешном выполнении логики М-команды Soft PLC
устанавливает сигнал выполнения М-команды.
3. Soft PLC передает (с помощью блока qMCommand) ядру системы управления
сигнал о результате выполнения М-команды. Получив этот сигнал, ядро снимает установленный
ранее сигнал активности М-команды. Soft PLC
ожидает (в блоке iMCommand) получения сигнала о сбросе этого флага.
4. Получив
уведомление о сбросе сигнала активности М-команды, Soft PLC, в
свою очередь, снимает сигнал выполнения М-команды.
Реализованный интуитивно понятный интерфейс канала
взаимодействия между ядром системы управления и Soft PLC
встраивается в управляющую программу электроавтоматики.
Среда
передачи данных для Soft PLC
Еще одним немаловажным аспектом построения
коммуникационного канала взаимодействия является выбор физической среды
передачи данных. При взаимодействии ядра системы ЧПУ с физическим ПЛК выполняется
передача информации по специализированным кабелям на значительное расстояние.
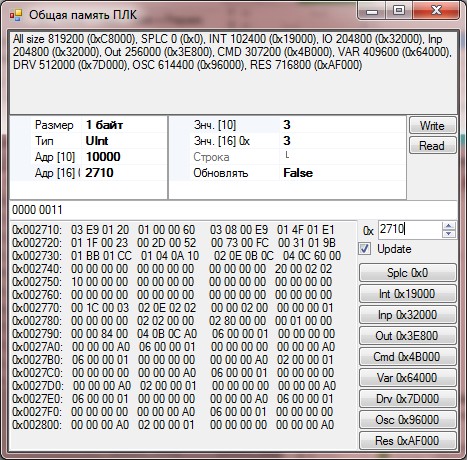
рис. 4 Общая
область памяти Soft PLC
Это объясняет причину предъявления жестких
требований к физическому каналу связи по защите от помех и внешних воздействий.
При использовании Soft PLC такая проблема может
решаться путем размещения его программного обеспечения на одном компьютере с
ядром системы управления. В этом случае механизм передачи данных по сети
заменяется обращением к общему разделяемому ресурсу. В адресном пространстве
ядра системы управления выделяется общая область памяти – CommonPLCMemory,
которая позволяет отображать как текущее состояние модулей входов и выходов
контроллера, так и данные специализированных модулей канала управления (рис. 4). В свою очередь Soft PLC
циклически осуществляет обращение к CommonPLCMemory с целью обновления собственных
данных и изменения области выходных переменных, сконфигурированных пользователем.
Заключение
Механизм использования общей для Soft PLC и ядра системы управления области памяти позволяет
минимизировать время на передачу данных и обеспечить высокий уровень защищенности
от различного вида внешних воздействий. Также упрощается механизм отладки
взаимодействия по коммуникационному каналу.
Представленный в данной работе коммуникационный
канал взаимодействия системы числового программного управления с
программно-реализованным контроллером реализован в виде отдельных библиотечных
модулей для Soft PLC и библиотеки расширения
для ядра системы управления. В настоящее время реализованный канал взаимодействия
имеет практическое применение на станке силового строгания Э7106МФ4.
Литература
1. Мартинов Г.М., Нежметдинов
Р.А. «Кроссплатформенный программно-реализованный логический контроллер
управления электроавтоматикой станков с ЧПУ» // Автоматизация и современные
технологии. 2013. № 1. С. 15-23.
2. Мартинов Г.М., Козак Н.В.,
Богданов С.В. Моделирование и реализация взаимодействия системы ЧПУ с автономным
ПЛК на основе протокола TCP/IP. В сборнике: Компьютерная интеграция
производства и ИПИ-технологии Материалы VI Всероссийской научно-практической
конференции. Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования "Оренбургский государственный
университет". 2013. С. 325-330..
3. Богданов С.В. Принципы
построения объектно-ориентированного канала связи системы ЧПУ с логическими устройствами
электроавтоматики на базе стандартных промышленных сетевых протоколов. Материалы
студенческой научно-практической конференции «Автоматизация и информационные
технологии (АИТ-2014)». Второй тур. Сборник докладов. - М.: ФГБОУ ВПО МГТУ «Станкин»,
2014. - С. 5-7.
4.
Нежметдинов Р.А., Никишечкин П.А., Евстафиева С.В., Волкова Ю.С.
Практические аспекты разработки программно-реализованного логического контроллера
SoftPLC и его интеграции в систему ЧПУ для управления системой
электроавтоматики. Материалы VI Всероссийской научно-практической конференции
"Компьютерная интеграция производства и ИПИ - технологии". с.168-174.
5. Козак Н.В., Нежметдинов
Р.А. Применение программно-реализованных логических контроллеров в системах автоматизации
упаковочного оборудования // Автоматизация в промышленности. 2012. № 11. С.
23-28.