Решёточный
подход к принятию решений в группе беспилотных
летательных аппаратов
Ю.С.
Легович,
зав. лаб, к.т.н, legov@ipu.ru
Д.Ю. Максимов,
н.с., jhanjaa@ipu.ru
ИПУ РАН, г. Москва
Предлагается
формальный способ представления желаний и намерений интеллектуального агента и
выбора решения в группе таких агентов при возникновении новой задачи на основе
использования понятия решетки на примере управления группой беспилотных
летательных аппаратов.
A formal method for wishes and
intentions representation of intellectual agent and decision choice in a group
of such agents at the origination of a new task based on lattice notion is
suggested. As an example we look a group of pilotless vehicles.
Введение
В последнее время для решения современных задач теории полета
стали использовать методы представления и описания поведения активных объектов
в изменяющихся внешних средах (адаптивные, сетецентрические, самоорганизующиеся
системы), основанные на парадигме агентно-ориентированных систем и использующие
понятие «интеллектуального агента» [1]. При этом движение летательных аппаратов
представляют как перемещение в пространстве таких агентов, объединенных общей
целью. Общность цели предполагает задачи по управлению общими ресурсами, которые
складываются из возможностей отдельных летательных аппаратов. Такие задачи
могут быть двух видов:
-
Возможности
по управлению пространственно – временной структурой группы;
-
Возможности
по изменению статуса летательного аппарата (боевой, разведывательный,
ложный, связи, …) или его
задачи.
В данной работе задачи первого вида не рассматриваются. Из задач
второго вида возможность изменения статуса летательного аппарата может
рассматриваться как задача реконфигурирования системной иерархии по одному заданному критерию при
возникновении новой цели [2,3]. В данной же работе рассматривается изменение
задачи летательного аппарата, принадлежащего группе одного типа объектов (например,
боевого), при появлении новой цели в условиях, когда намерения разных аппаратов
этой группы ранжируются в соответствии с разными
критериями. Для того, чтобы сравнивать предпочтения, характеризующиеся разными
критериями, и выбирать объект для решения новой задачи предлагается
использовать аппарат теории решеток [4].
1.
Постановка задачи
Будем использовать понятие «интеллектуальный летательный аппарат
(ИЛА)» для летательного аппарата, который способен оценивать ситуацию,
взаимодействовать с другими ИЛА, принимать самостоятельные решения в группе ИЛА
[1]. ИЛА функционирует, выполняя поставленные задачи, в соответствии с
собственными критериями и с учетом мнения других ИЛА. Задачи, которые стоят
перед ИЛА, жестко не фиксированы и могут меняться в зависимости от ситуации.
Множество поставленных задач называется желаниями
ИЛА. Но не все желания могут быть осуществлены в реальной ситуации. Те желания,
которые в данный момент ИЛА представляются осуществимыми, называются его текущими намерениями. Представления об
осуществимости возникают на основе убеждений
– информации о складывающейся обстановке от датчиков самого ИЛА и поступающая
от других ИЛА.
У разных ИЛА критерии, по которым они формируют текущие намерения,
могут различаться и, кроме того, меняться во времени. В этом случае возникает
проблема – каким образом принимать решение о выделении объекта группы
однотипных ИЛА на решение новой задачи при ее возникновении? Новая цель
включается в список желаний у всех данных ИЛА, но как сравнивать намерения при
разных критериях их формирования? Об этом - следующий раздел.
2.
Метод сравнения намерений
Предположим, что желания α, β, γ и т.д. ИЛА
являются образующими дистрибутивной решетки и что, как объекты этой решетки,
они не пересекаются, т.е. задачи, стоящие перед ИЛА не имеют пересечений.
Положим, что перед группой ИЛА возникла новая задача δ. Эта
задача добавляется в образующие решеток всех ИЛА группы.
Тогда, такая решетка имеет вид как на рис. 1 (решетка с исходными
образующими α, β, γ и новой образующей δ для некоторого
определенного ИЛА1)
В этой решетке вершины U можно трактовать как всевозможные
намерения ИЛА1, которые тем более ценные, чем выше они расположены, т.е. чем
больше желаний осуществимо. Самая ценная вершина – наибольший элемент решетки ┬,
когда реализуемы все желания, а наименее ценный – наименьший ┴, когда
никакое желание не достижимо. Из всех этих намерений в текущий момент времени
выбираются в соответствии с некоторым критерием соответствующие какой-то одной
вершине, пусть это будет Uαβδ.
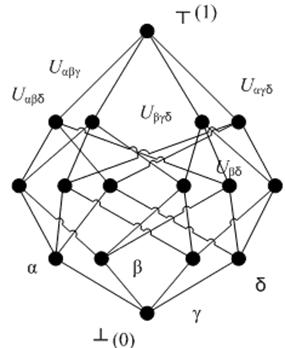
рис.1
В решетке другого ИЛА2 (рис.2), в соответствии с его критерием,
пусть выбираются намерения Uµδ:
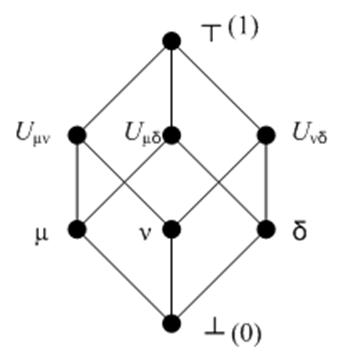
рис.2
Всякую такую решетку можно разделить на ряд уровней – уровень
образующих (вершины α, β, γ, δ на рис.1), уровень Uβδ, уровень Uαβδ и т.д. до максимального уровня ┬.
Припишем каждому уровню степень ценности Vi :
уровню образующих – V0 = 0, уровню ┬ Vn = 1, а остальным уровням по формуле Vi = i /n, где n – число уровней
намерений, а i – номер уровня, считая снизу. Так, на
рис.1 степень ценности уровня Uβδ
V1 = 1/3, степень ценности уровня Uαβδ – V2 = 2/3, на рис.2 степень ценности уровня Uµδ – V1 = 1/2. Таким образом, намерение тем более ценно, чем оно ближе к
наибольшему элементу решетки и чем больше желаний в него входит.
Видим, что ценность намерений ИЛА1 – 2/3, а ИЛА2 – 1/2. Таким
образом, включение новой цели в намерения ИЛА1 предпочтительнее, чем в
намерения ИЛА2.
Заключение
Мы рассмотрели способ сравнения намерений интеллектуальных агентов
при возникновении новой задачи в группе однотипных агентов на примере группы
беспилотных летательных аппаратов. Но тот же метод может быть приложен и к
группе однотипных роботов и любых других интеллектуальных агентов. Мы
сопоставили множеству всех возможных намерений агента дистрибутивную
решетку и оценили ценность разных намерений в зависимости от близости этих
намерений к ее наибольшему элементу,
т.е. к наиболее желанному варианту, и от числа желаний, входящих в намерения.
Не всегда возможно выбрать единственное решение, пользуясь этим методом – при
равенстве числовых значений ценностей выбранных намерений следует использовать
иные критерии выбора. Тем не менее, при различном числе желаний у агентов этот
метод всегда позволяет принять решение о назначении исполнителя новой задачи в
группе, что может быть полезным в групповом управлении самоорганизующимися
системами и в анализе среды функционирования сложных систем [5].
Литература
1.
Абросимов В.К. Групповое
движение интеллектуальных летательных аппаратов в антагонистической среде. М.:
Наука, 2013. 168 с.
2.
Максимов Д.Ю. Реконфигурирование
системной иерархии методами многозначной логики // на рецензии в АиТ уже 5 мес.
3.
Легович Ю.С.,
Максимов Д.Ю. Логические модели выбора решения в самоорганизующихся
системах // Проблемы управления. 2013. № 3. С. 18-27.
4.
Биркгоф Г. Теория решеток.
М.: Наука, 1984. 568 с.
5.
Рожнов А. В., Кривоножко В.
Е., Лычёв А. В. Построение гибридных интеллектуальных информационных сред и компонентов
экспертных систем на основе обобщённой модели анализа среды функционирования //
Нейрокомпьютеры: разработка, применение. 2013. №6. С. 3-12.