Контроль
электронных изделий по создаваемому ими магнитному полю[1]
В.В. Амеличев1, к.т.н.,
нач. отдела,
Е.И. Артамонов2, д.т.н., зав. лаб.,
Т.Н. Герасименко3, к.ф-м.н., ассистент,
С.И. Касаткин2, д.т.н., зав. лаб.,
Д.В. Костюк1, руков. лаб.,
А.М. Муравьёв2, к.т.н., с.н.с.,
А.И. Петров2, асп.,
Н.В. Плотникова2, вед. инж.,
П.А. Поляков3, к.ф-м.н. проф.,
В.А. Ромакин2, к.т.н., с.н.с.,
К.А. Савельев2 вед. инж.,
1) НПК Технологический центр, г. Зеленоград
2) ИПУ РАН, г. Москва
3) Физфак МГУ имени М.В. Ломоносова, г. Москва
Рассмотрены результаты исследований возможностей
контроля изделий по создаваемому ими магнитному полю. Предложена модель расчёта
тока и создаваемого им магнитного поля в проводнике с прямоугольным дефектом.
Описана разработанная и изготовленная анизотропная магниторезистивная головка-градиометр
для измерения приповерхностных магнитных полей для контроля функционирования
электронных компонент по создаваемому ими магнитному полю. Описана работа
стенда с тестовой платой в составе плоттера.
Введение
В настоящее время для обнаружения дефектов и
неисправностей изделий наиболее широко используются методы оптического и
рентгеновского контроля, а также электрические методы (внутрисхемное и
функциональное тестирование) [1].
Оптический контроль позволяет выявить в первую
очередь отсутствие электрических и конструкционных компонентов, деформацию их
выводов, неправильную маркировку, обрывы проводников и паразитные перемычки,
непропаянные соединения и т.д. [1]. В мелкосерийном производстве такой контроль
осуществляется визуально с использованием оптических методов, в крупносерийном –
с использованием автоматизированных установок [2]. Из недостатков оптического
контроля можно отметить то, что он не позволяет проверить работоспособность изделия
в сборе.
Функциональное тестирование применяется после
оптического контроля, однако, оно не позволяет локализовать дефекты. Кроме
того, при подаче напряжения платы с дефектами могут получить серьезные
повреждения. Внутрисхемное тестирование позволяет обнаружить отсутствующие,
неправильно установленные или дефектные компоненты, обрывы проводников,
паразитные перемычки и т.д. [1].
Сейчас для тестирования электронных компонент
получают распространение устройства, измеряющие магнитное поле, создаваемое
работающей печатной платой или микросхемой [1, 3]. Для измерения используются
магниторезистивные (МР) преобразователи магнитного поля [4]. В связи с этим
возникают задачи определения работоспособности изделия и, в частности,
местоположения дефекта в проводнике по создаваемому им магнитному полю, и
создания МР преобразователя магнитного поля для измерения приповерхностного
магнитного поля.
Магнитное поле прямоугольного
дефекта в проводнике
Одним из распространённых дефектов электронных
компонент являются нарушения топологии проводников. Рассмотрим влияние
прямоугольного выреза в проводнике на распределение в нём тока и конфигурацию
создаваемого в результате магнитного поля. В общем случае плотность тока в
проводнике зависит от значений компонент электромагнитного поля в веществе и свойств
материала проводника. Так на электромагнитное поле и ток в магнитных материалах
может оказывать влияние магнитная структура внутри вещества, а также
поверхностные особенности материала. Для проводников с малой магнитной
восприимчивостью (например, медь) и в пренебрежении поверхностными
особенностями, задача о распределении тока в проводнике в стационарном случае
сводится к решению уравнения Лапласа для скалярного потенциала [5]. После его
решения, ток можно найти по закону Ома
![]() , (1)
, (1)
где σ — удельная
проводимость материала проводника, φ — скалярный потенциал.
Для того чтобы найти потенциал φ, был
использован метод конформных преобразований, при этом вместо скалярного
потенциала использовался комплексный: ![]() , где
, где ![]() — скалярный потенциал
комплексного аргумента z, V(z)
— функция потока. Граничные условия соответствуют тому, что силовые линии
электрического поля, совпадающие с линиями равного уровня функции потока, не
пересекают границ проводника. Кроме того, предполагается, что задана суммарная
сила тока через проводник. При таких условиях решаемая задача принимает вид
— скалярный потенциал
комплексного аргумента z, V(z)
— функция потока. Граничные условия соответствуют тому, что силовые линии
электрического поля, совпадающие с линиями равного уровня функции потока, не
пересекают границ проводника. Кроме того, предполагается, что задана суммарная
сила тока через проводник. При таких условиях решаемая задача принимает вид
где n – внешняя нормаль к границе.
В случае дефекта
произвольного вида решение этой системы представляет собой сложную
математическую задачу, решение которой возможно только численно. Однако, для
ряда областей возможно получить аналитическое решение [6]. Для этого решение
задачи ищется в верхней комплексной полуплоскости, а затем строится отображение
этой полуплоскости на искомую область. В верхней полуплоскости задача сводится
к нахождению комплексного потенциала точечного заряда в двумерном случае. Её
решение хорошо известно:
![]() . (2)
. (2)
Для прямоугольного выреза в линейном проводнике искомое
отображение z(z1) было приведено в работе [6] путём отражения более
простой области вдоль оси симметрии. В приведенном там решении возникают
нефизические расходимости плотности тока в углах дефекта, что вызывает большие
сложности при численном расчете магнитного поля. Поэтому для их устранения был
использован механизм скругления углов, описанный в работе [7]. В этом случае
отображение верхней полуплоскости на полосу с уступом задаётся интегралом
Шварца-Кристоффеля, результат расчета которого имеет следующий вид
 (3)
(3)
Здесь h —
ширина проводника, k —
ширина дефекта, γ, δ1, δ2 — параметры, определяющие величину радиуса
скругления ρ. Их значения
определяются численно для каждой величины ρ
[7]. Они приведены в таблице 1 для некоторых радиусов скругления.
Таблица 1
Значения параметров скругления от радиуса
|
ρ/h |
γ |
δ1 |
δ2 |
|
0,09 |
0.9697 |
0.6231 |
1.0531 |
|
0,08 |
0.9126 |
0.5925 |
0.9684 |
|
0,07 |
0.9318 |
0.5479 |
0.8447 |
|
0,06 |
0.9803 |
0.4991 |
0.7373 |
|
0,05 |
0.9803 |
0.4480 |
0.6201 |
|
0,04 |
0.9216 |
0.3995 |
0.5387 |
|
0,03 |
0.8639 |
0.3404 |
0.4346 |
|
0,02 |
0.9580 |
0.2594 |
0.3109 |
|
0,01 |
0.5982 |
0.1890 |
0.2165 |
|
0,005 |
0.8628 |
0.1099 |
0.1188 |
|
0,001 |
0.3712 |
0.0496 |
0.0537 |
Поскольку в данной работе, скругление внутреннего
угла требуется только для устранения сингулярности плотности тока, во всех расчетах
было использовано значение ρ/h=0,01.
Используя (1) и (2) можно показать [7], что
компоненты и величина плотности тока определяются как
![]()
где I — суммарная сила тока
через проводник, τ — толщина
проводника, а
 .
.
Подробный механизм «обрезки» и «отражения»
полученного таким образом распределения плотности тока в полосе с уступом, для
получения интересующих распределений в полосе с прямоугольным вырезом описан в
работе [5].
По найденному распределению тока в проводнике, его
магнитное поле было найдено численно с помощью закона Био-Савара-Лапласа.
Входящий в него интеграл был взят численно с помощью формулы Симпсона для
кратных интегралов. Поле от полубесконечных полос было найдено в аналитическом
виде.
На рис. 1 приведено
распределение вертикальной составляющей магнитного поля поперёк проводника без
дефекта и с прямоугольным дефектом (по центру дефекта) на удалении 100 мкм от
поверхности проводника. Размеры проводника и дефекта: h =
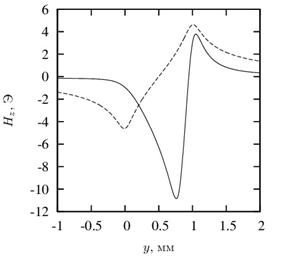
рис. 1. Распределение вертикальной составляющей
магнитного поля поперёк проводника без дефекта (пунктирная линия) и с
прямоугольным дефектом (сплошная линия)
АМР чувствительный наноэлемент с линейной вольт-амперной
характеристикой (ВАХ) повторит распределение вертикальной составляющей
магнитного поля, создаваемого током в проводнике, и покажет наличие в нём
дефекта и его местоположение.
АМР головка-градиометр
МР преобразователи магнитного поля наиболее
подходят для решения задачи измерения приповерхностного магнитного поля, создаваемого
работающим изделием. МР преобразователи имеют высокую чувствительность,
измеряют как постоянное, так и переменное магнитное поле до частоты 1 ГГц [3].
Нами разработана АМР головка-градиометр,
позволяющая измерять локальное магнитное поле с высоким ослаблением однородного
магнитного поля. АМР головка-градиометр содержит подложку с диэлектрическим
слоем, тонкопленочные АМР полоски, содержащие верхний
и нижний защитные слои, между которыми расположена ферромагнитная FeNiCo плёнка. Поверх тонкопленочных АМР полосок расположен первый
изолирующий слой, на котором сформирован проводник для подачи импульсов set/reset с рабочими частями,
расположенными над тонкопленочными АМР полосками и
верхний защитный слой.
На рис. 2 приведена топология головки-градиометра. Конструктивно, АМР головка-градиометр состоит из четырёх плеч
мостовой схемы, одно из которых 1 – рабочее плечо и три балластных плеча.
Рабочее плечо находится около края АМР головки-градиометра, а три балластных
плеча удалены от рабочего плеча.
Тонкоплёночные АМР полоски
соединены немагнитными низкорезистивными перемычками.
Над полосками расположен планарный проводник для подачи импульсов тока set/reset для устранения влияния гистерезиса на
результаты измерения магнитного поля.
В тонкоплёночные АМР
полоски подаётся постоянный сенсорный ток для считывания сигнала. Перед началом
работы в проводник подаётся импульс тока произвольной полярности, но одинаковой
каждый раз, для устранения влияния гистерезиса на результаты измерения
магнитного поля. Импульс тока должен быть достаточно большой величины (обычно
около 1 – 2 А), чтобы в проводнике создать во всех тонкоплёночных АМР полосках
одинаковое магнитное состояние, чем и достигается устранение влияния
гистерезиса на результаты измерения магнитного поля.
Перед началом измерения
векторы намагниченности ферромагнитной плёнки в тонкоплёночных АМР полосках
направлены вдоль её оси лёгкого намагничивания (ОЛН), развёрнутой
приблизительно на 450 от оси длины полоски. Это направление векторов
намагниченности соответствует линейной ВЭХ АМР головки-градиометра с
максимальной чувствительностью. В тоже время, из-за симметричного магнитного
состояния всех четырёх плеч мостовой схемы, однородное магнитное поле,
действующее на АМР головку-градиометр, не будет создавать сигнал считывания на
выходе мостовой схемы. При этом воздействие однородного магнитного поля на АМР
полоски приводит к изменению в них направления векторов намагниченности, что,
при приближении величины однородного магнитного поля к краю линейного диапазона
головки-градиометра приведёт к уменьшению её чувствительности.
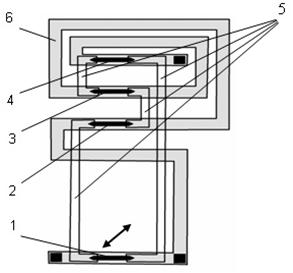

рис. 2. Топология АМР
головки-градиометра: 1-4 – АМР полоски; 5 – низкорезистивные соединения
полосок; 6 – проводник set/reset рис. 3. Осциллограмма ВЭХ
АМР головки-градиометра
Локальное магнитное поле,
действующее на рабочее плечо мостовой схемы АМР головки-градиометра, изменяет
направления векторов намагниченности ферромагнитной плёнки, что меняет
магнитосопротивление тонкоплёночной АМР полоски и приводит к появлению сигнала
считывания. Аналогично АМР преобразователю магнитного поля головка-градиометр
будет обладать ВЭХ с линейным участком (рис. 3). На этом рисунке приведена
осциллограмма ВЭХ АМР головки-градиометра для размеров FeNiCo6 полоски размером 20х120 мкм2 для
толщины ферромагнитной плёнки 20 – 25 нм. Из-за того, что в АМР
головке-градиометре только одно рабочее плечо, её чувствительность, по
сравнению с АМР преобразователем магнитного поля, в несколько раз меньше и
достигает величины не более 0,1 мВ/(ВхЭ). Для h =
400 мкм чувствительность по току – 0,6 мВ/(В*А). Реальное ослабление влияния
однородного магнитного поля на сигнал головки-градиометра составляет величину
не менее 15 раз.
Исследовния макета АМР головки с
плоттером
Был разработан и изготовлен
стенд в составе АМР головки с электронной платой и плоттером DP-1545 и тестовой печатной
платы с проводниками толщиной 18 мкм и шириной W = 100, 200, 400 и 800 мкм, часть из которых
имеет дефекты в виде прямоугольных углублений заданных размеров. По своей
конструкции плоттер относится к планшетному типу, в котором исследуемый объект
неподвижно закреплен на плоском столе. АМР головка перемещается по двум
перпендикулярным направлениям под действием шаговых двигателей, на которые
поступают соответствующие импульсы по осям Х и У. На каждый импульс головка
перемещается на 1 шаг по одному из 8 направлений с дискретностью по углу 45о.
На рис. 4 приведена
фотография АМР головки с электронной платой и тестовой печатной платой.
Разработано специализированное программное
обеспечение для управления процессом перемещения датчика, считывания и
обработки сигналов магниторезистивных датчиков. Пользовательский интерфейс
программы позволяет настраивать маршрут, шаг и скорость перемещения датчика, а
также частоту регистрации сигнала.
На рис. 5 приведен пример графика считанного
(исходного) сигнала с головки-градиометра и сигнала после устранения
наводок от токовых импульсов и шумов, возникающих вследствие малой величины
сигнала. Для
вычисления амплитуды обработанный сигнал разбивается на циклы по положительному
и отрицательному фронту амплитуды; для каждого цикла вычисляется полуразность
максимального и минимального значения.

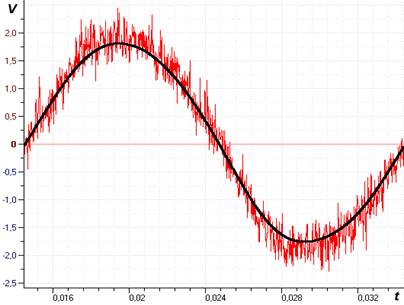
рис. 4. Фотография макета
АМР головки с тестовой печатной платой рис. 5. График сигнала с головки-градиометра до и
после удаления шума
Были проведены измерения
сигналов АМР головки-градиометра от планарных проводников на одинаковом
удалении головки от поверхности проводника на тестовой печатной плате. Были
измерены распределения сигналов головки (магнитного поля, создаваемого током в
проводнике) вдоль широкой части проводника (со стороны дефекта) и поперёк узкой
части проводника с двух сторон проводника. Шаг перемещения головки плоттера
составлял 25 мкм.
На рис. 6 показаны
экспериментальные распределения магнитного поля от проводника шириной 800 мкм
без дефекта (1) и с дефектом глубиной 400 мкм (2) при прохождении головки
плоттера перпендикулярно проводнику приблизительно через центр дефекта при токе
100 мА. Сигнал проводника с дефектом смещён от сигнала без дефекта
приблизительно на 250 мкм, что, с учётом расширения распределения сигнала с
удалением от поверхности проводника, показывает реальные размеры дефекта и его
местоположение.
На рис. 7 показано
экспериментальное распределение магнитного поля от проводника шириной h =
800 мкм с дефектом глубиной 400 мкм и длиной l =
200 мкм при прохождении головки плоттера вдоль края проводника с дефектом.
распределение магнитного поля вдоль проводника так же информативно для
выявления дефекта и его расположения. При отсутствии дефекта магнитное поле
должно быть постоянным, а при наличии дефекта отчётливо видно изменение поля,
характеризующее местоположение и размеры дефекта. На рис. 8 показаны
экспериментальное и теоретическое нормированные распределения магнитного поля
от проводника шириной h = 800 мкм с дефектом
глубиной 400 мкм и длиной l = 200 мкм при прохождении
головки плоттера перпендикулярно проводнику приблизительно через центр дефекта
на высоте z = 120 мкм.
Точная высота головки
определялась из наилучшего совпадения экспериментального и теоретического
распределений магнитного поля. Из графиков видно хорошее совпадение
распределений магнитного поля, что позволяет определять параметры и
расположение дефекта в проводнике.
Измерения распределений
магнитного поля для других ширин проводников и размеров дефектов показали
хорошее совпадение с теоретическим расчетом. Оценки пороговой чувствительности
по току обнаружения дефектов данной разработанной головкой-градиометром дают
значения в единицы миллиампер при ширине проводника в 100 мкм с учётом усреднения
сигнала. Эта величина может быть существенно улучшена за счёт модернизации
головки с учётом полученных результатов исследования.
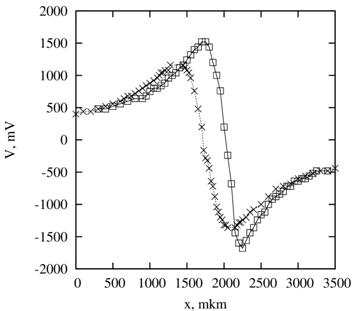
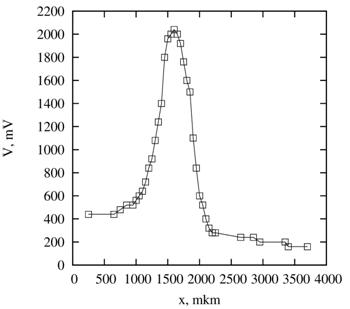
рис. 6. Экспериментальные
распределения магнитного поля от проводника шириной 800 мкм без дефекта
(пунктирная линия) и с дефектом (сплошная линия) при прохождении головки
плоттера перпендикулярно проводнику через центр дефекта рис. 7. Экспериментальное
распределение магнитного поля от проводника шириной 800 мкм с дефектом при
прохождении головки плоттера вдоль проводника
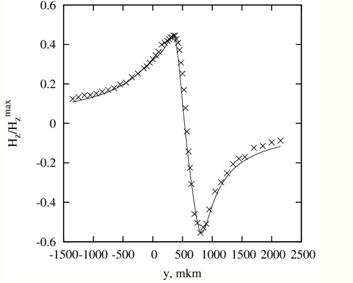
рис.
8. Нормированные экспериментальное (крестики) и теоретическое (сплошная линия) распределения
магнитного поля от
проводника с дефектом при прохождении головки плоттера перпендикулярно
проводнику
Заключение
Разработан способ аналитического определения
плотности тока в проводнике с дефектом прямоугольной формы, позволяющий
избежать нефизичных сингулярностей плотности тока в углах. Это дало возможность
теоретически рассчитать поле такого проводника в любой точке пространства. Разработана
и исследована АМР головка-градиометр для измерения приповерхностного магнитного
поля работающего изделия с линейной ВЭХ и ВАХ, требуемой чувствительностью и
ослаблением однородного магнитного поля. Показана её работоспособность на
примере обнаружения прямоугольного дефекта в планарном проводнике. Разработано
программно-математическое обеспечение для управления продвижением головки-градиометра
в плоттере и обработки сигнала магнитометра с АЦП.
Разработан и протестирован макет из АМР головки с
электронной платой и плоттером. Измерение магнитных полей, создаваемых в
тестовой печатной плате с проводниками с дефектами, показали работоспособность
макета и перспективность данного метода диагностики.
Литература
1. Касаткин С.И., Васильева
Н.П., Муравьев А.М., Плотникова Н.В. Контроль и диагностика печатных плат и
микросхем посредством анализа их магнитных полей // Датчики и системы. ИКА,
2008. – Т. 1. – С. 49–53.
2. Козлов А.С., Щербаков С.A.
Оптические методы контроля соединений на печатных платах и безопасность
эксплуатации электронных устройств // Вопросы теории безопасности и
устойчивости систем, 2006. – Т. 8. – С. 186–196.
3.
Сайт фирмы Micro Magnetics: www.micromagnetics.com
4. Касаткин С.И., Васильева
Н.П., Муравьёв А.М. Спинтронные
магниторезистивные элементы и приборы на их основе // М.: Изд. Электронсервис,
2005. – 180 с.
5. Смайт В. Электростатика и
электродинамика // М.: Издательство иностранной литературы, 1954.
6. Герасименко Т.Н., Иванов
В.И., Поляков П.А., Попов В.Ю. Применение конформных преобразований к краевым
задачам расчета токов в полосковых проводниках // Фундаментальная и прикладная
математика, 2009. – Т. 15, №. 6. – С. 3–14.
7.
Gerasimenko T.N., Polyakov
P.A. Application of conformal mapping technique to problems of direct current
distribution in thin film wires bent at arbitrary angle. arXiv:1112.0506v2
[math-ph].