Настройщик для
ПИД-регулятора и его реализация
А.Г.
Александров,
внс, д. ф.-м. н., проф., alex7@ipu.ru,
Д. В. Шатов,
м.н.с.,
dvshatov@gmail.com,
ИПУ РАН, Москва
Рассматривается система
управления, состоящая из объекта управления и ПИД-регулятора, в которую
вводится новый блок, называемый настройщик. При изменении параметров объекта
управления настройщик производит их идентификацию, которая позволяет
производить автоматическую подстройку параметров ПИД-регулятора. Подстройка
осуществляется в соответствии с алгоритмом расчета параметров регулятора,
используемым оператором.
Физически настройщик
представляет собой функциональный блок, написанный на языке ST, который можно
использовать при синтезе систем управления в среде CoDeSys. Приведен пример применения
настройщика для системы управления на экспериментальном стенде.
Control system consisting of a plant and a PID controller is described.
A new element called tuner is introduced to the system. Parameters of the plant
are changing in time, the tuner identifies new values of these parameters,
which allows automatic tuning of the PID controller. Tuning is done according
to control parameter calculation algorithm used by the system operator. The
tuner itself is represented by a functional block written in ST language, this
block can be used in CoDeSyS IDE to synthesize control systems. Practical
example of control system based on the tuner is given.
Введение
ПИД-регуляторы широко
распространены в управлении технологическими процессами, что обусловлено их
простой реализацией и достаточно высокой эффективностью. Однако, ПИД-регуляторы
требуют обслуживания и периодической подстройки их параметров, из-за того, что
объекты управления обладают дрейфующими во времени параметрами. Решение этой
задачи возможно различными путями.
Исторически первый метод
был предложен Циглером и Никольсом [1]. Их метод предполагает одноразовую
настройку параметров ПИД-регулятора при пуске системы. Расчет коэффициентов
ПИД-регулятора производится либо по параметрам объекта управления, полученным
по переходной характеристике объекта управления. Либо по амплитуде и фазе
автоколебаний замкнутой системы. Вывод на режим автоколебаний производится
постепенным увеличением коэффициента усиления ПИД-регулятора. Возможно
сочетание двух метод расчета коэффициентов регулятора. Возможности этих методов
настройки ПИД-регулятора не позволяют учесть дрейф параметров объекта
управления, и без подстройки коэффициентов ПИД-регулятора с течением времени эффективность
работы регулятора будет снижаться.
Избежать этого позволяют
адаптивные ПИД-регуляторы.
Разрабатывается
несколько направлений в адаптивном ПИД-управлении. Одно из них связано с
частотным адаптивным управлением. В [2] предлагается алгоритм адаптивного
управления объектом с запаздыванием. Практическая реализация этого алгоритма
описана в [3]. В той же статье предлагается модификация ПИД-регулятора,
позволяющая использовать его для адаптации к объектам управления, которые
теряют устойчивость при небольших изменениях параметров объектов. В [4]
предлагается вместо адаптивного ПИД-регулятора использовать настройщик, который
выполняет схожие функции. Настройщик определяет параметры объекта управления,
что позволяет производить адаптацию параметров ПИД-регулятора. Но в отличие от
[3] настройщик может использоваться в системах со стандартными
ПИД-регуляторами.
В работе описывается
алгоритм работы настройщика, описывается его реализация, приводится пример
применения.
1. Назначение и алгоритм работы
настройщика
Рассмотрим систему
автоматического регулирования [4]. Уравнение объекта имеет вид:
 (1)
(1)
где ![]() — измеряемый выход
объекта,
— измеряемый выход
объекта, ![]() — управляющее
воздействие,
— управляющее
воздействие, ![]() — неизвестное,
ограниченное внешнее возмущение, действующее на объект,
— неизвестное,
ограниченное внешнее возмущение, действующее на объект, ![]() — номер режима работы
объекта.
— номер режима работы
объекта. ![]() — параметры объекта
управления: коэффициент усиления, постоянная времени и запаздывание соответственно,
которые изменяются в момент времени
— параметры объекта
управления: коэффициент усиления, постоянная времени и запаздывание соответственно,
которые изменяются в момент времени ![]() и сохраняют свое
значение на интервалах времени
и сохраняют свое
значение на интервалах времени ![]() , которые достаточно велики.
, которые достаточно велики.
ПИД-регулятор
описывается уравнением:
 (2)
(2)
где ![]() — коэффициенты
ПИД-регулятора,
— коэффициенты
ПИД-регулятора, ![]() — задающее воздействие
(уставка),
— задающее воздействие
(уставка), ![]() — ошибка слежения.
Параметры регулятора рассчитываются, исходя из модели объекта, и также остаются
постоянными для каждого режима работы объекта.
— ошибка слежения.
Параметры регулятора рассчитываются, исходя из модели объекта, и также остаются
постоянными для каждого режима работы объекта.
При изменении параметров объекта требуется
соответствующее изменение коэффициентов регулятора, для сохранения системой
устойчивости и поддержания требуемого качества регулирования.
Для адаптации данной
системы к меняющимся во времени параметрам объекта используется настройщик,
построенный с использованием алгоритмов конечно-частотной идентификации и
позволяющий найти параметры объекта управления в условиях действия внешнего
возмущения. Новая схема системы автоматического управления изображена на Рис. 1
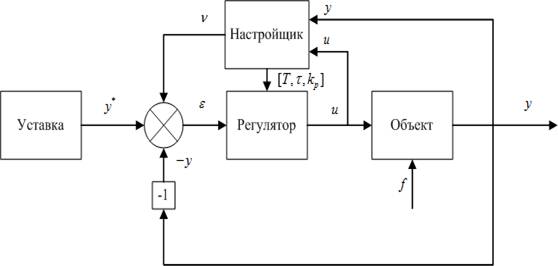
рис. 1. Схема системы автоматического
управления с настройщиком
Настройщик служит для
идентификации коэффициентов модели объекта и изменения коэффициентов
ПИД-регулятора. Настройщик работает параллельно с работой замкнутого контура.
При изменении режима работы объекта настройщик идентифицирует объект, а расчет
коэффициентов регулятора осуществляется по тому же алгоритму, что используется
человеком-оператором.
Работа настройщика
построена следующим образом. К ошибке слежения, подаваемой на вход регулятора,
добавлется испытательный сигнал, в результате она принимает вид:
![]() (3)
(3)
где ![]() — испытательный сигнал
вида:
— испытательный сигнал
вида:
![]() , (4)
, (4)
где ![]() ,
, ![]() — частоты испытательного сигнала,
— частоты испытательного сигнала, ![]() ,
, ![]() — амплитуды испытательного сигнала, выбираемые
из условия
— амплитуды испытательного сигнала, выбираемые
из условия ![]() , где
, где ![]() — положительное число.
— положительное число.
В настройщик поступают
сигналы управления с регулятора и выход объекта, они проходят через фильтры
Фурье:
 (5)
(5)
где ![]() — момент начала
фильтрации испытательного сигнала,
— момент начала
фильтрации испытательного сигнала, ![]() — время фильтрации
сигнала.
— время фильтрации
сигнала.
Используя выходы
фильтров Фурье, найдем числа:
 , (6)
, (6)
которые дают
коэффициенты объекта:
 (7)
(7)
Описанная выше
идентификация производится непрерывно, параллельно с работой объекта.
Периодически производятся расчет коэффициентов объекта управления по формулам
(7).
2. Реализация настройщика
Настройщик реализован в
IDE CoDeSyS 2.3, предназначенной для работы с промышленными контроллерами и
создания систем управления технологическими объектами. Настройщик представляет
собой функциональный блок (FB), написанный на языке ST, и предназначенный для
использования при программировании контроллеров. Функциональный блок
настройщика помещен в библиотеку TUNER.lib. Подключая эту библиотеку к
различным проектам, разработчик может программировать системы управления также
на языке ST, либо на языке функциональных непрерывных диаграмм (FBD).
Программа
функционального блока настройщика соответствует алгоритму, описанному в
предыдущем пункте.
На Рис. 2. изображен
функциональный блок настройщика, из разработанной библиотеки.
рис. 2. Схема системы автоматического
управления с настройщиком
Опишем назначение входов
и выходов настройщика. Входами блока являются переменные:
SET_POINT : REAL — величина уставки, используется для
расчета амплитуд испытательного сигнала.
TEST_AMP : REAL
— параметр ![]() , используемый для расчета амплитуд.
, используемый для расчета амплитуд.
TS: REAL — предполагаемая постоянная времени объекта,
задается в секундах.
H : REAL — периодичность вызова
функционального блока в секундах.
ACTUAL_U : REAL — текущее значение управления,
вырабатываемое ПИД-регулятором.
ACTUAL_Y : REAL — текущий выход объекта.
Выходами блока являются следующие
переменные:
TEST : REAL — текущее значение испытательного
сигнала, которое необходимо прибавить к сигналу ошибки слежения в соответствии
с (3).
k, T, tau : REAL — найденные в результате работы
настройщика параметры объекта (1).
FINISH : BOOL
— признак, определяющий можно ли использовать найденные текущие
параметры объекта (1).
3. Пример применения
Для экспериментального
исследования работы программного обеспечения настройщика был разработан
специальный стенд, состоящий из промышленного контроллера ПЛК ОВЕН-150 и
промышленного контроллера WinPAC-8441. В контроллере WinPAC был реализован
имитатор объекта (1), в который заложена возможность периодической смены
коэффициентов объекта.
Система управления,
состоящая из блоков ПИД-регулятора и настройщика, была запрограммирована в
контроллере ОВЕН. В качастве ПИД-регулятора использовался стандартный
функциональный блок, поставляемый вместе со средой разработки. Расчет
коэффициентов ПИД-регулятора осуществлялся по алгоритму, предложенному в [7].
В эксперименте на
начальном режиме работы объекта были заложены следующие параметры объекта
управления: ![]()
Внешнее возмущение
принято одинаковым на протяжении всего эксперимента и равно ![]() . Величина уставки в эксперименте была постоянной и равна
. Величина уставки в эксперименте была постоянной и равна ![]() .
.
Для указанных параметров
объекта были рассчитаны коэффициенты регулятора ![]() .
.
Затем была произведена
смена параметров объекта, их значения стали соответственно: ![]() Настройщик произвел идентификацию параметров объекта
управления, на его выходе были получены следующие значения оценок параметров
Настройщик произвел идентификацию параметров объекта
управления, на его выходе были получены следующие значения оценок параметров ![]()
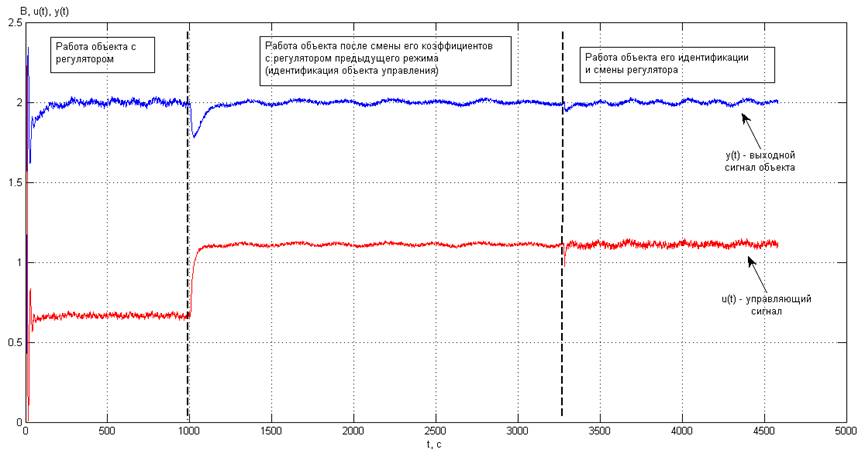
рис. 3. Результаты экспериментального
исследования работы настройщика
Параметры настройщика в
течение всего эксперимента принимали следующие значения. Частоты испытательного
сигналы выбирались следующими: ![]() параметр для расчета
амплитуд испытательного сигнала выбран
параметр для расчета
амплитуд испытательного сигнала выбран![]() (суммарная амплитуда испытательного сигнала равна 1% от
уставки), по этому параметру амплитуды гармоник испытательного сигнала были
рассчитаны как
(суммарная амплитуда испытательного сигнала равна 1% от
уставки), по этому параметру амплитуды гармоник испытательного сигнала были
рассчитаны как ![]() .
.
По оценкам, найденным
настройщиком, были рассчитаны новые коэффициенты регулятора ![]() .
.
Окончательно
испытательный сигнал имел вид ![]() .
.
На рисунке 3.
представлены графические результаты эксперимента. График отображает значения
входного и выходного сигналов объекта управления. Также указаны моменты смены режима
объекта и замены регулятора на новый. График показывает, что в течение
эксперимента ошибка оставалась на допустимом уровне.
Заключение
Разработан настройщик
для ПИД-регулятора, который представляет собой функциональный блок. Он может
быть использован при создании систем управления технологическими объектами для
подстройки коэффициентов регуляторов к меняющимся во времени параметрам
объектов. Настройщик основан на методе конечно-частотной идентификации, с
помощью которого находятся оценки параметров объекта управления, по которым
можно вносить изменения в коэффициенты ПИД-регулятора. Изменения могут
осуществляться по алгоритмам, используемым человеком оператором.
Экспериментальные исследования подтвердили его эффективность.
Литература
1. Astrom
K. J., Hagglund T. Advanced PID Control // ISA. 2006 Research Triangle Park,
North Carolina.
2. Александров А. Г. Адаптивное
управление объектом с запаздыванием. Труды IX Международной Четаевской
конференции "Аналитическая механика, устойчивость и управление
движением", посвященной 105 - летию Н.Г. Четаева, том 3, Управление и
оптимизация, стр. 6-13, Иркутск, 2007.
3. Александров А. Г., Паленов М. В.
Самонастраивающийся ПИД/И регулятор // Автоматика и телемеханика. 2011. №~10.
С. 4--18.
4. Шатов Д.В., Александров А.Г. Настройщик
для системы автоматического регулирования / Материалы конференции Управление
большими системами. Уфа: УГАТУ, 2013. Т. 3. С. 15-18.
5. Visioli
A. Improving the load disturbance rejection performance of IMC-tuned PID-
controllers // Proc. Of 15th Triennial World Congress. Barselona,
2002. Preprints. Spain. P. 666-671.