Подход к построению компьютеризированных
преобразователей параметров многомерных
объектов,
представляемых в виде линейных электрических
цепей
Д.А.
Бобылёв,
с.н.с.,
к.т.н., dabobyl@ipu.ru,
Л.П.
Боровских,
с.н.с.,
к.т.н.,, borovski@ipu.ru,
ИПУ РАН, г.
Москва
Рассмотрен
подход, предусматривающий вычисление искомых параметров объекта по значениям
интегрального преобразования Фурье импульсной характеристики его модели – её
иммитанса. Предложена структура соответствующего преобразователя и описан
универсальный алгоритм вычисления параметров объекта.
The
approach based on the computation of the required
parameters of plant under investigation over samples of integral Fourier transformer of model pulse response
(i.e. samples of immittance, in frequency-domain) is considered. frequency-domain methods are
compared. The structure of a corresponding
converter is suggested. The universal algorithm for computation of the required
parameters by measuring data is described.
Введение
Многие многомерные объекты контроля,
измерения и управления можно представить моделью в виде линейной электрической
цепи, параметры (значения сопротивлений, емкостей, индуктивностей и др.)
которой несут важную информацию о свойствах исследуемого объекта. В таких
случаях возникает задача разработки подхода к построению технических средств,
позволяющих с необходимой точностью воспринимать эту информацию и
преобразовывать её в форму, удобную для использования в автоматических
системах. Среди известных подходов к решению данной задачи оптимальным (в
смысле точности, помехоустойчивости и универсальности) следует признать подход,
заключающийся в вычислении искомых параметров по значениям интегрального
преобразования Фурье импульсной характеристики модели – её иммитанса. Довольно
часто модель объекта представляется в виде линейного электрического
многоэлементного двухполюсника с сосредоточенными параметрами, и задача
заключается в нахождении численных значений параметров многоэлементного
двухполюсника (ПМД) по массиву значений его иммитанса, для получения которых
целесообразно воспользоваться частотным методом. Применение современных средств
вычислительной техники и цифровой обработки сигналов позволяет сравнительно
просто реализовать указанный подход.
1. Частотный метод преобразования ПМД
Метод основан на измерении
значений иммитанса X(f) двухполюсника на некотором
множестве значений частоты f1, f2,..., fN и определении ПМД на
основании полученной информации [1]. Учитывая комплексный характер иммитанса,
максимальное число идентифицируемых параметров при этом будет равно 2N. В этом случае, как
правило, применяется синусоидальное тестовое воздействие (ТВ) определенной
частоты fi, а значение иммитанса вычисляется как отношение комплексного напряжения
![]() на двухполюснике к
комплексному току
на двухполюснике к
комплексному току ![]() , протекающему через него:
, протекающему через него:
 .
.
Составляющие исследуемых сигналов ![]() ,
, ![]() ,
, ![]() и
и ![]() определяются в результате
фазочувствительного преобразования (ФЧП), представляющего собой скалярное
произведение сигнала на орты gRe(t)
и gIm(t) длительности T, образующие ортогональную систему
координат. Например, ФЧП напряжения
определяются в результате
фазочувствительного преобразования (ФЧП), представляющего собой скалярное
произведение сигнала на орты gRe(t)
и gIm(t) длительности T, образующие ортогональную систему
координат. Например, ФЧП напряжения ![]() имеет вид:
имеет вид:
 .
.
В преобразователях и
измерителях иммитанса частотная характеристика ФЧП носит характер частотной
характеристики полосового фильтра, полоса пропускания которого тем уже, а
подавление частотных составляющих за ее пределами тем больше, чем больше время
преобразования. Это свойство ФЧП (синхронного детектирования) хорошо известно и
служит эффективным средством выделения периодических сигналов малого уровня на
фоне помех. При этом всегда существует возможность разнесения спектров ТВ и
периодической помехи. Что же касается подавления экспоненциальных и
полиномиальных помех, то эта проблема также довольно эффективно решается [2].
Совершенствование измерителей иммитанса, широкое применение
современных средств вычислительной техники, а также цифровой обработки сигналов
обусловили предпосылки создания простых, дешевых и в то же время весьма точных
средств измерения иммитанса.
2. Реализация универсального преобразователя ПМД
Структурная схема
преобразователя ПМД на основе измерения иммитанса в диапазоне частот изображена
на рис. 1. Персональный компьютер (ПК)
управляет устройством через последовательно-параллельный адаптер ППА по
протоколу RS-232. Такая связь с ПК позволяет располагать
преобразователь на значительном удалении от ПК (до 300 м) и использовать как
проводную связь, так и Wi-Fi-конвертер.
Все сигналы в
преобразователе когерентные, формируются из сигнала задающего генератора
импульсов ГИ посредством делителей частоты ДЧ1 и ДЧ2 и
формирователя временных интервалов ФВИ. Синусоидальный тестовый сигнал синтезируется
посредством делителя частоты ДЧ1 и синтезатора С квазисинусоидального
сигнала, высшие гармоники которого подавляются фильтром нижних частот ФНЧ.
Исследуемые сигналы:
напряжение u(t) на объекте измерения X
и напряжение Roi(t), пропорциональное току,
протекающему через него, формируются в измерительной цепи (ИЦ), построенной с использованием
рабочего эталона Ro, включенного в обратную
связь операционного усилителя, дифференциального усилителя ДУ и
балластного резистора Rб, который обеспечивает
устойчивость ИЦ при любом характере объекта измерения.
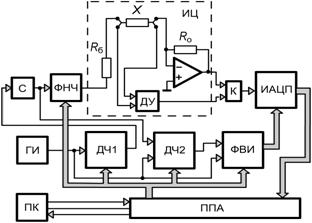
рис. 1 Структурная схема преобразователя ПМД
Исследуемый сигнал,
например u(t), через коммутатор К поступают на вход интегрирующего
аналого-цифрового преобразователя (ИАЦП), управление которым осуществляется
ФВИ, таким образом, что на выходе ИАЦП формируется коды, пропорциональные
последовательности интегрально-взвешенных значений ui исследуемого сигнала с
шагом дискретизации Δt:
 .
.
Весовая функция q(t)
обеспечивает предварительную фильтрацию исследуемого сигнала на стадии
дискретизации [3].
Шаг дискретизации Δt –
период импульсной последовательности на выходе ДЧ2 составляет не менее 2
мс, это позволяет отказаться от буферной памяти: передача данных в ПК
осуществляется в реальном масштабе времени: i-я дискрета передается в ПК во время
аналого-цифрового преобразования (i + 1)-й. Время измерения зависит от частоты ТВ и
требуемого помехоподавления и варьируется в диапазоне от десятков миллисекунд
до нескольких секунд.
Действительные и мнимые составляющие исследуемых
сигналов ![]() и
и ![]() ,
, ![]() и
и ![]() вычисляются
посредством взвешенного суммирования результатов дискретизации [3]. Поскольку
делитель частоты ДЧ2 синхронизируется сигналом с выхода синтезатора С,
ФЧП обоих сигналов в широком диапазоне частот ТВ осуществляется строго в одной
и той же ортонормированной системе координат.
вычисляются
посредством взвешенного суммирования результатов дискретизации [3]. Поскольку
делитель частоты ДЧ2 синхронизируется сигналом с выхода синтезатора С,
ФЧП обоих сигналов в широком диапазоне частот ТВ осуществляется строго в одной
и той же ортонормированной системе координат.
Применение описанного способа
отбора и обработки измерительной информации позволяет обеспечить высокую
помехоустойчивость преобразователя и с учетом выбранного метода преобразования
иммитанса максимально снизить влияние на точность преобразования
инструментальных погрешностей применяемых узлов [3]:
·
прежде всего, напряжение смещения операционных усилителей и АЦП совершенно
не влияет на результат преобразования;
·
погрешность формирования ТВ приводит лишь к появлению дополнительных гармоник,
влияние которых в силу выбранного способа реализации ФЧП ничтожно;
·
поскольку иммитанс вычисляется как относительная величина, мультипликативные
погрешности канала преобразования исследуемых сигналов не оказывают влияния на
результат преобразования составляющих иммитанса. Это позволяет применять любые
линейные, в том числе, и частотно-зависимые звенья для дополнительных усиления
или фильтрации исследуемых сигналов, а также формирования нужной частотной
характеристики канала их общего преобразования, с целью адаптации его к
особенностям частотной характеристики датчика.
3. Универсальный вычислительный алгоритм определения ПМД
частотным методом
Для любого метода
определения ПМД весьма важным представляется процедура вычисления параметров, в
качестве исходных данных для которой служит массив полученных скалярных
величин. Перспективность метода напрямую зависит от того, насколько
универсальными являются алгоритмы вычислений и в какой степени они позволяют
унифицировать процедуру вычислений параметров для различных схем замещения и с
большим числом элементов. В общем случае вычисление ПМД связано с решением
системы громоздких нелинейных уравнений.
Для частотного метода
измерения ПМД был предложен универсальный алгоритм определения ПМД, который
состоит из двух этапов [1, 4]. На первом из них решается система линейных
уравнений относительно коэффициентов ci дробно-рациональной функции иммитанса
 , (2)
, (2)
где n – число
независимых контуров двухполюсника, x = (x1, x2,…, xn) – вектор параметров
двухполюсника. Коэффициенты ci представляют собой непрерывно дифференцируемые функции параметров xi: ci
= ui(x); «+1» в
показателе степени соответствует функции сопротивления Z![]() , а «–1» – функции проводимости Y
, а «–1» – функции проводимости Y![]() двухполюсника.
двухполюсника.
На втором этапе по
полученным значениям коэффициентов ci вычисляются параметры xi путём решения
простой системы нелинейных уравнений
ci = ui(x), ![]() . (3)
. (3)
Пусть, например, измерено m значений иммитанса на m частотах ωi,
тогда получим m
уравнений вида:
![]() ,
, ![]() , (4)
, (4)
где
αi и βi – результаты
измерений.
Выразив Ai и Bi через коэффициенты
дробно-рациональной функции (3), приравняв соответственно действительные и
мнимые части равенства (4) и положив для определённости n чётным,
а c0 = 1, можно составить неоднородную систему линейных
уравнений

 , (5)
, (5)
из которой находятся
коэффициенты дробно-рациональной функции (2). Далее из системы нелинейных
уравнений (3) определяются искомые ПМД.
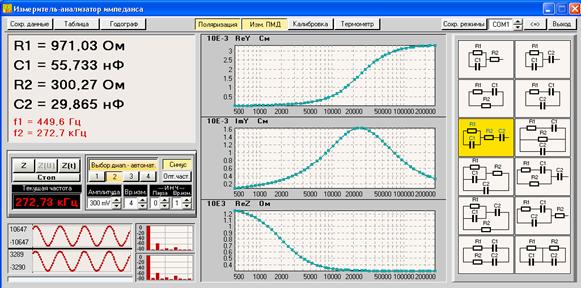
рис.
2 Пример реализации программного интерфейса компьютеризированного преобразователя параметров многоэлементных двухполюсников
Такой алгоритм позволяет
существенно унифицировать вычисление ПМД для разнообразных схем замещения,
поскольку наиболее трудоёмкая часть вычислений сводится к решению системы
линейных уравнений. Система нелинейных уравнений весьма проста, и она решается
на конечной стадии вычислений. Данный подход значительно облегчает анализ
погрешностей, необходимый для метрологического сопровождения измерительного
средства, и обеспечивает универсальность преобразователя ПМД. Один из возможных
вариантов реализации программного интерфейса такого измерительного средства
представлен на рис. 2.
Рассматриваемый алгоритм
позволяет в вычислительной процедуре выделить ту ее часть, когда можно влиять
на точность определения ПМД. Так, в матрицу системы линейных уравнений входят
значения частот, на которых измеряются составляющие иммитанса. Эти значения
можно задавать, исходя из критерия минимума погрешности определения ПМД, в
частности, минимума числа обусловленности матрицы системы линейных уравнений.
Если матрица достаточно хорошо обусловлена, то для минимизации случайных
погрешностей определения ПМД целесообразно выбрать значение ![]() и воспользоваться
методом наименьших квадратов
и воспользоваться
методом наименьших квадратов
Частотный метод позволяет
работать не только с дробно-рациональными функциями иммитанса вида (2), но и с
дробно-иррациональными. Такие функции иммитанса, например, встречаются при
исследовании объектов на переменном токе, когда их схемы замещения содержат так
называемый импеданс Варбурга, моделирующий процессы диффузии. В таких случаях
появляется дополнительная возможность – использовать избыточную априорную
информацию для повышения точности определения параметров схем замещения [5].
Простота вычислительной
процедуры допускает многократное ее применение и открывает новые возможности
для интеллектуализации измерителей ПМД, выбора оптимальных значений частот,
инвариантного измерения ПМД, анализа погрешностей методом обратного анализа
ошибок, самоповерки, калибровки, определения структуры схемы замещения и др.
Заключение
Применение современных
средств вычислительной техники в измерительных устройствах и совершенствование
элементной базы позволяют по-новому расставить акценты в решении проблемы
создания технических средств восприятия и преобразования параметров многомерных
объектов. В настоящее время можно создавать компьютеризированные измерители
ПМД, достаточно простые в реализации и обладающие высокими метрологическими
характеристиками.
Литература
1.
Кнеллер В.Ю., Боровских Л.П. Определение
параметров многоэлементных двухполюсников. – М.: Энергоатомиздат, 1986. – 144
с.
2.
Бобылев Д.А. Фазочувствительные преобразования,
инвариантные к аддитивной помехе, представленной полиномом конечного порядка //
Датчики и системы. – 2007. № 12. С. 8 – 14.
3.
Агамалов
Ю.Р., Бобылев Д.А., Боровских Л.П., Кнеллер В.Ю. Виртуальный самоповеряемый анализатор
иммитанса с адаптивными функциональными возможностями // Датчики и системы.–
2008. № 7. С. 21 – 27.
4.
Боровских Л.П., Читашвили Н.Г. Об инвариантном
измерении параметров трехэлементных двухполюсников // Измерительная техника. –
1990. № 1. С. 42 – 44.
5.
Боровских Л.П. Использование априорной информации для
повышения точности измерения параметров объектов с многоэлементной схемой замещения
// Датчики и системы. – 2006. № 12. С. 22 – 25.