Организация
структур технических и программных средств проектирования
и управления. Средства взаимодействия, структуры данных, международные
стандарты
Растровое
представление геометрической модели
С.Н. Григорьев,
д.т.н.,
проф.,
ректор МГТУ «Станкин»,
А.В. Толок,
д.т.н.,
зав. каф. ИГ,
Д.А. Силантьев,
аспир.
каф. ИГ,
Е.А. Лоторевич,
аспир.
каф. ИГ,
С.А.
Пушкарёв,
аспир.
каф. ИГ,
МГТУ
«Станкин», г. Москва
В
работе рассмотрен принцип организации растровой геометрической модели, отвечающей
основным требованиям полноты и точности представления аналитической
геометрической модели. Приведён пример применения аппарата R-функций к растровым геометрическим моделям.
Ключевые
слова: Растровая геометрическая
модель, векторная геометрическая модель, аналитическая геометрическая модель, R-функции, М-образ, Булевы операции.
In work consider a
principle of the organization of a raster for representation of the geometrical
model meeting the main requirements of completeness and accuracy of representation
of analytical geometrical model. Of example, use of R-functions to the raster
organization for representation of geometrical model is shown.
Key words: a raster for
representation of the geometrical model, a vector for representation of the
geometrical model, R-function, M-image, Boolean operations.
Введение
Развитие
растровой компьютерной графики, а также повышение требований к полноте и
точности геометрического описания объектов, позволяет ставить вопросы о
переходе векторной платформы представления компьютерной геометрической модели
(ВГМ) к её растровому представлению (РГМ).
Наиболее
полным и точным представлением геометрической модели является её аналитическое
описание, которое зачастую является основой для получения компьютерного
дискретного представления.
Научная
визуализация, работая с аналитическим представлением моделей (АГМ), в
большинстве базируется на применении средств растровой графики, поскольку та
имеет больший набор аппаратных средств для наглядного представления математического
описания в точечном пространстве. Однако не все системы научной визуализации
формируют при этом геометрическую модель РГМ. Одной из таких систем является
система РАНОК [1], задача которой заключается в формировании образной РГМ
математического объекта, достаточной для выполнения основных задач геометрического
моделирования на графической основе.
Постановка
задачи
В
основу организации РГМ входит главное отличие от ВГМ - принцип 2,5D-пространства. Этот принцип широко применим в
растровой графике. Он имитирует на плоскости характеристики трёхмерного
пространства.
а)
б)
рис.1. Пример изображения
инвариантов геометрической модели поверхности средствами: а) 3D-объект
ВГМ, б)2,5D-объект РГМ
Например,
функция ![]() (1) на рисунке 1а
представлена ВГМ, а на рисунке 1б – РГМ. В обоих случаях отображается высотное
отношение точек геометрической модели.
(1) на рисунке 1а
представлена ВГМ, а на рисунке 1б – РГМ. В обоих случаях отображается высотное
отношение точек геометрической модели.

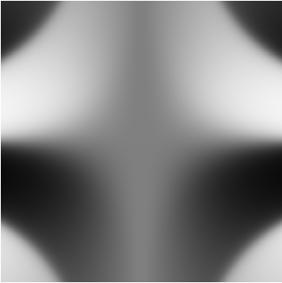
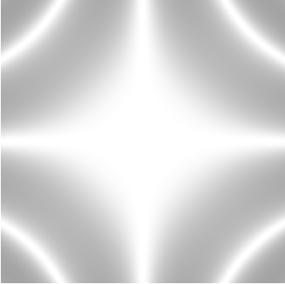
рис.2. М-образы нормального
поля поверхности функции: а)![]() ; б)
; б) ![]() ; с)
; с) ![]()
Рассмотрим вопрос
полноты предлагаемой РГМ. Возможны ли геометрические преобразования над
объектами, представленными РГМ?
Одной из важных функциональных операций в
геометрическом моделировании являются Булевы операции. Рассмотрим возможность
работы РГМ с математическим аппаратом R-функций для получения
объединённой модели с образной информацией, соответствующей её аналитическому
прототипу.
Для построения РГМ применим принцип аппроксимации
поверхности функции касательными плоскостями. Для каждой точки пространства функции
![]() определим тройку
окрестных точек, не лежащих на одной прямой
определим тройку
окрестных точек, не лежащих на одной прямой![]() , где
, где ![]() .
.
Функция определения плоскости по трём точкам
выражается из определителя по формуле:
 (1)
(1)
Коэффициенты касательной плоскости, нормируем до
косинусных компонентов нормали для выбранной окрестности точки нормального поля
![]() с той разницей, что в отличие от принятого способа получения
трёхкомпонентного нормального поля в процессе нормирования используются все
четыре коэффициента полученной касательной плоскости
с той разницей, что в отличие от принятого способа получения
трёхкомпонентного нормального поля в процессе нормирования используются все
четыре коэффициента полученной касательной плоскости ![]() :
:
 (2)
(2)
Далее установим некоторое соответствие скалярных
полей ![]() с их растровым
представлением
с их растровым
представлением ![]() , выразив через градацию интенсивности тона монохромной
палитры
, выразив через градацию интенсивности тона монохромной
палитры ![]() .
.
![]() . (3)
. (3)
Четыре растровых монохромных слоя представляют РГМ
функции в евклидовом пространстве ![]() .
.
Пример
Для наглядности изложения рассмотрим пример
пересечения функций двух окружностей, описанный соответственно: ![]()
![]()
На рисунке 3 изображены
М-образы ![]() для функций
для функций ![]() и их объединения
и их объединения ![]() с применением аппарата
R-функций. Для наглядности выбрана положительная область этих функций.
с применением аппарата
R-функций. Для наглядности выбрана положительная область этих функций.
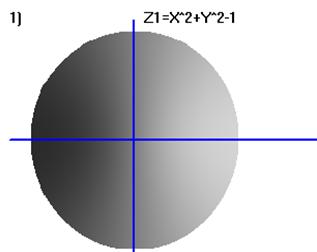
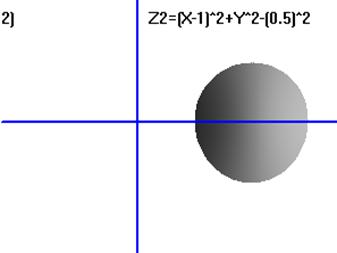
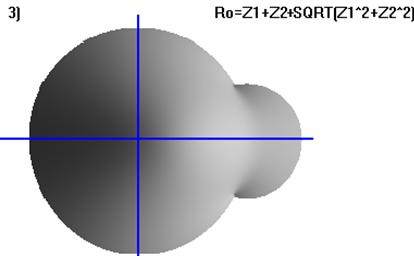
рис.3. М-образы Сх для заданных функций и их объединения
Рассмотрим применение аппарата R-функций
не непосредственно к предикатам ![]()
![]() , а новому представлению РГМ, где уравнение математических
объектов (МО) принимает единую структуру вида:
, а новому представлению РГМ, где уравнение математических
объектов (МО) принимает единую структуру вида: ![]() . Коэффициенты
. Коэффициенты ![]() вычисляются для каждого
МО исходя из численных значений пикселя РГМ:
вычисляются для каждого
МО исходя из численных значений пикселя РГМ:
![]()
![]()
В результате, для рассматриваемого случая имеем
объединение двух РГМ: ![]() ,
, ![]() . Предикатные уравнения с применением параметров РГМ
принимают вид:
. Предикатные уравнения с применением параметров РГМ
принимают вид:
![]() и
и ![]() , где
, где ![]() ,
, ![]()
Далее применяется математический аппарат R-функций
для получения нового РГМ как объединение двух РГМ окружностей:
![]() .
.
Дальнейшее преобразование каждой тройки высотных
значений ![]() для окрестности точек
математического объекта аналогично приведенным преобразованиям (1), (2) и (3)
формирует данные М-образов искомой РГМ. Аналогичным путем получаем пересечение
двух РГМ.
для окрестности точек
математического объекта аналогично приведенным преобразованиям (1), (2) и (3)
формирует данные М-образов искомой РГМ. Аналогичным путем получаем пересечение
двух РГМ.
Результат получения М-образа ![]() как объединения
как объединения ![]() представлен на рисунке
4.
представлен на рисунке
4.
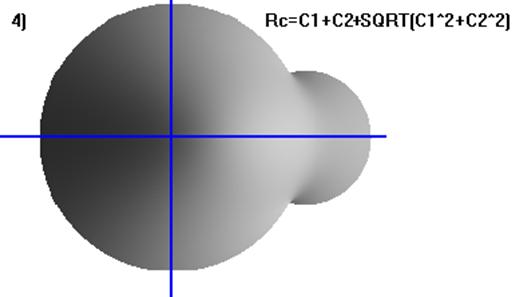
рис.4. Результирующий
М-образ Сх3 для РГМ3, полученный объединением РГМ1
и РГМ2
Заключение
Характерным является тот факт, что применение
структуры РГМ в математическом моделировании позволяет приводить модели
различного математического описания к единой образной структуре. Такой подход
открывает возможность разработок приложений интерактивного графического пространственного
моделирования математических объектов с обратной связью. Это значит, что в
результате, на выходе моделируемого объекта может быть не только РГМ, но и её
результирующее аналитическое описание, полученное автоматическим путём.
Литература
1. Толок А.В. Применение воксельных
моделей в процессе автоматизации математического моделирования // Автоматика и телемеханика, №6, 2009. С. 167-180.
2.
Максименко-Шейко
К.В., Толок А.В., Шейко Т.И. R-функции в
аналитическом проектировании с применением системы «РАНОК» // Вестник МГТУ «Станкин». Научный рецензируемый журнал. М.: МГТУ «Станкин». №4(12). 2010. С.139-151.
3.
Лисин Д.А., Максименко-Шейко
К.В., Толок А.В., Шейко Т.И. R-функции в компьютерном
моделировании дизайна 3D поверхности автомобиля // Прикладная
информатика № 5 (35) , 2011, “МаркетДС”, С.78-85.
4.
Григорьев С.Н., Толок А.В., Силантьев Д.А., Лоторевич
Е.А., Пушкарёв С.А. Вопросы развития графических способов решения
математических задач на компьютерной основе // Материалы 40-й междунар. конф. «Информационные технологии в науке, образовании,
телекоммуникации и бизнесе (IT+S&E*12)». — Приложение к журналу Открытое
образование. — С.66-71.