Разработка системы
автоматизированного проектирования средств автоматики на элементах
высокотемпературной струйной техники[1]
Е.И. Артамонов,
зав. лаб., д.т.н, проф., eiart@ipu.ru,
А.М. Касимов,
зав. лаб., д.т.н,
проф., kasimov@ipu.ru,
А.Е. Артамонов,
техн., aeart@bk.ru,
А.В. Балабанов,
с.н.с., к.т.н., fca07@mail.ru,
И.В. Кузичев,
инж.-прогр., kuzicheviv@gmail.com,
А.И. Попов,
с.н.с., daten@ipu.ru,
В.А. Ромакин,
с.н.с., к.т.н., insight.ru@gmail.com,
Л.Н. Сизова,
н.с., lusysz@bk.ru
ИПУ РАН, г. Москва
В статье
представлены результаты разработки системы
автоматизированного проектирования средств автоматики на элементах
высокотемпературной струйной техники. Описаны структурная схема системы,
математическое обеспечение для реализации сплайнов, реализация алгоритмов 3D-моделирования сборки и работы
устройств автоматики, базы данных 2D- и 3D-моделей
струйных элементов.
Роль струйных первичных
измерительных преобразователей (ПИП) технологических параметров исключительна
[1]. Возможность их работы в
непосредственной близости к технологическому оборудованию, которое, как
правило, характеризуется тяжелыми окружающими условиями (высокие и низкие
температуры, вибрация, электромагнитные помехи и т.п.), в ряде случаев делает
струйные ПИП незаменимыми. Это, в первую очередь, относится к пневматическим
(газовым) струйным ПИП, т.к.
газовая рабочая среда практически
не подвержена изменению своего агрегатного
состояния.
В
производственных процессах часто применяются горючие или взрывоопасные
материалы, при переработке которых возникают серьезные затруднения в
использовании электрических элементов автоматики и электроприводов в обычном
исполнении. В таких процессах с успехом применяется пневматическая регулирующая
аппаратура в силу ее взрыво- и пожаробезопасности.
На фоне перспективности
развития струйных ПИП возникает вопрос автоматизации проектирования конструкций
таких устройств. В этой связи, в настоящей статье представлены результаты работ
по созданию системы автоматизированного проектирования средств автоматики на
элементах высокотемпературной струйной техники, которые, по мнению авторов,
должны быть полезны разработчикам систем такого рода при решении теоретических
и прикладных задач.
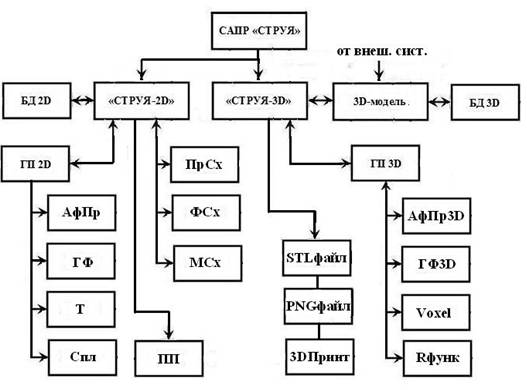
рис. 1 Структурная
схема САПР «СТРУЯ»
Структурная схема системы автоматизированного
проектирования средств автоматики на элементах высокотемпературной струйной
техники (САПР «СТРУЯ») представлена на рис. 1. Схема содержит подсистемы геометрического моделирования
средств автоматики на плоскости (2D) («СТРУЯ-2D»), объемного (3D) геометрического
моделирования («СТРУЯ-3D»), формирования 3D-моделей (3D-модель), базы данных плоских и объемных моделей
элементов и средств автоматики на элементах струйной техники (БД 2D и БД 3D).
Подсистема «СТРУЯ-2D» содержит геометрический процессор ГП2D и программные блоки проектирования
принципиальных (ПрСх),
функциональных (ФСх)
и монтажных (МСх)
схем.
Геометрический процессор в свою очередь
включает блоки аффинных преобразований (АфПр), построения простых геометрических фигур (ГФ), текста (Т) и различные реализации алгоритмов построения сплайнов Спл. Блок
постпроцессоров (ПП) реализует связь
с графопостроителями, станками с ЧПУ и другими внешними устройствами.
Подсистема «СТРУЯ-3D» содержит геометрический процессор (ГП3D) и программные блоки: аффинных
преобразований в 3D (АфПр3D), построения объемных простых
геометрических фигур (ГФ3D), построения 3D-моделей в воксельной
форме (Voxel) и реализации R-функций (Rфунк). Реализацию физических
3D-моделей осуществляет 3D-принтер (3DПринт), для чего в подсистеме СТРУЯ-3D формируется stl-файл
3D-модели, преобразуется в послойный png-формат (блок PNGфайл) и выводится на 3D-принтер.
На начальных
этапах проектирования, в подсистеме «Струя-2D»
производится построение принципиальных и монтажных схем при использовании
специально разработанной базы данных элементарных модулей струйной техники.
Пример разработанной базы данных приведен в табл.1.
Таблица 1
Пример
базы данных струйных элементов
|
Наименование |
Принципиальная
схема |
Циклограмма
работы |
Монтажная
схема |
Образец |
|
Триггер с
питанием Т1 |
|
|
|
|
|
Элемент
ИЛИ |
|
|
|
|
|
Усилитель
Ус |
|
|
|
|






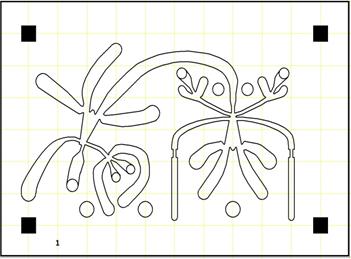
рис. 2 Пример струйных элементов с каналами,
выполненными по сплайновым траекториям
При проектировании схем
струйных элементов иногда возникает необходимость выполнения каналов по сплайновым
траекториям, как показано на рис. 2. С этой целью, в системе «Струя» реализованы кубические сплайны
трёх видов:
- два интерполяционных
сплайна (интерполяционные кубические кривые Эрмита и сплайновые кривые Катмулла Рома);
- сглаживающий сплайн третьего
порядка.
Математические задачи,
решаемые в системе «СТРУЯ» при помощи сплайнов, заключаются в построении либо
гладкой кривой, проходящей через заданный набор точек {Pi=(xi,yi)} i=0..N (базисные точки), либо гладкой
кривой, точки которой лежат в некоторой заданной окрестности базисных и на
которой достигается минимум определённого функционала. Первая задача решается с
помощью интерполяционных сплайнов, вторая – с помощью сглаживающих.
Интерполяционные
кубические кривые Эрмита (КЭ), определённые по N+1 базисной точке, можно представить
как композицию N
элементарных КЭ. Каждая такая элементарная кривая
задаётся с помощью двух базисных точек Pi, Pi+1 и двух ненулевых векторов Qi, Qi+1 по формуле
![]() (1)
(1)
Здесь
∆t
= t-ti, ti ≤ t ≤ ti+1. Составная КЭ есть композиция элементарных S(t)=USi(t)
[2]. Составная КЭ единственным образом определяется
заданием N+3 векторов – N+1
базисной точкой Pi
и двумя векторами Q0, QN. Остальные N-1 вектора Qi определяются из условий сшивки элементарных
кривых в узлах сетки. Эти условия обеспечивают С2-гладкость
получающегося сплайна, т.е. непрерывность второй производной КЭ, и дают
следующую систему уравнений для Qj, j=1..N-1:
![]() (2)
(2)
Вектора
Qi представляют собой касательные вектора к кривой в
базисных точках. Вектора Q0 и QN должны быть заданы заранее, и в
качестве граничных условий в системе «СТРУЯ» используются либо граничные
условия 2-го типа (вторые производные в граничных точках равны нулю), либо
периодические граничные условия для замкнутых кривых.
Линейная
система алгебраических уравнений (2) является системой с трёхдиагональной
матрицей и может быть решена методом прогонки [3] (модификацией метода Гаусса).
Будем искать решение системы (2) в виде Qi=αi+1Qi+1+βi+1, i=1..N-1. Подставив это выражение в (2),
получим следующие соотношения для α и β:
![]() (3)
(3)
![]() (4)
(4)
Соотношения
(3), (4) позволяют найти Qi. Следует отметить, что решение
системы (2) методом прогонки является точным решением, однако в случае плохо
обусловленной системы, когда её определитель близок к нулю, решение является
неустойчивым и может накапливать численную ошибку.
Сплайновая
кривая Катмулла-Рома (КР) однозначно определяется
заданием N+1
базисной точки {Pi=(xi,yi)} i=0..N и двух векторов P-1, PN+1,
являющихся граничными условиями [2]. В качестве граничных условий используются
либо граничные условия 2-го типа, либо периодические условия для замкнутых
кривых. КР может быть представлена в виде композиции
элементарных КР, которые определяются четырьмя точками и задаются формулой
![]() (5)
(5)
![]()
В выражении (5) ∆t=t-ti, ti ≤ t ≤ ti+1. Особенностью сплайновой кривой КР является то, что
касательный вектор в точке Pj коллинеарен
вектору Pj+1-Pj-1 (рис. 3).
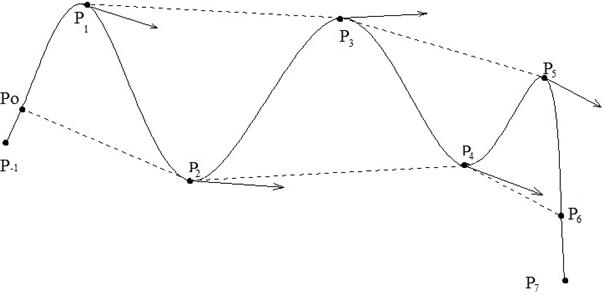
рис. 3 Пример сплайна Катмулла-Рома
На рис. 3
показаны семь базисных точек P0..P7 и две дополнительных, получаемых
из граничного условия. Касательные вектора в базисных точках коллинеарны векторам разности соседних точек (пунктирная
линия).
Нахождение точек
P-1, PN+1 из граничных условий полностью
определяет все элементарные КР, а, следовательно, и всю составную сплайновую
кривую. Таким образом, сплайн Катмулла-Рома не
требует дополнительных вычислений. Однако гладкость КР меньше, чем у двух
других сплайнов, поскольку непрерывна лишь первая производная.
Сглаживающий
кубический сплайн проходит не через базисные точки, а вблизи них, так, чтобы
получающаяся кривая была максимально плавной, т.е. была бы обеспечена
минимизация следующего функционала при некоторых дополнительных условиях.
![]() (6)
(6)
Более точно, задача
нахождения сглаживающего кубического сплайна (СС) ставится следующим образом:
по заданному набору точек {Pi=(xi,yi)} i=0..N и сетке Ω на отрезке изменения
параметра t=[0
N] найти функцию S(t), которая обладала бы следующими
свойствами:
- на каждом отрезке
сетки является полиномом третьей степени,
- на всём отрезке t принадлежит к классу C2,
- минимизирует
функционал
![]() ,
(7)
,
(7)
где ρi – заданные числа. Хотя все величины
являются двухкомпонентными (по х и по y координате), компоненты независимы, и
формальную запись (7) следует интерпретировать как сделанную для каждой
компоненты в отдельности;
- удовлетворяет
граничным условиям.
В качестве граничных
условий выбирались либо условия второго типа с нулевыми вторыми производными в
граничных точках, либо периодические условия для замкнутых кривых.
Указанные условия
однозначно определяют сплайн S(t) [2]. В САПР «СТРУЯ» используется
способ нахождения сглаживающего сплайна, в котором число величин, подлежащих
определению, равно 2N+2
(для каждой координаты). Сплайн представляется как композиция элементарных
сплайнов S(t)=USi(t), где Si(t) определяется следующим образом
![]() (8)
(8)
В
(8) ∆t=t-ti, ti
≤ t ≤ ti+1, i=0..N-1. Числа Vi, qi являются решениями линейной
алгебраической системы уравнений:
 (9)
(9)
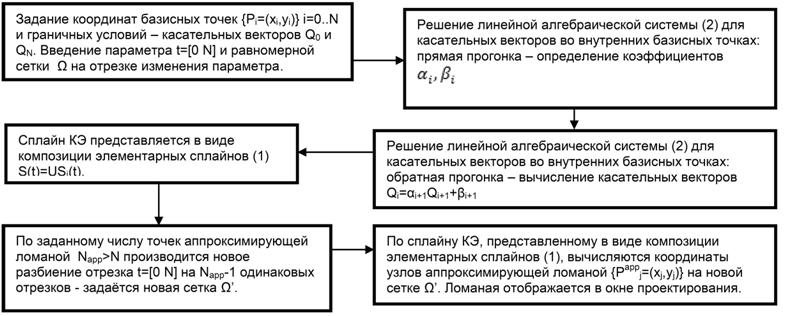
рис. 4 Алгоритм построения интерполяционной
кубической кривой Эрмита
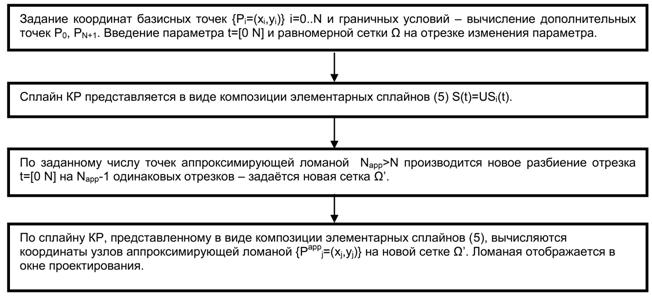
рис. 5
Алгоритм построения сплайна Катмулла-Рома
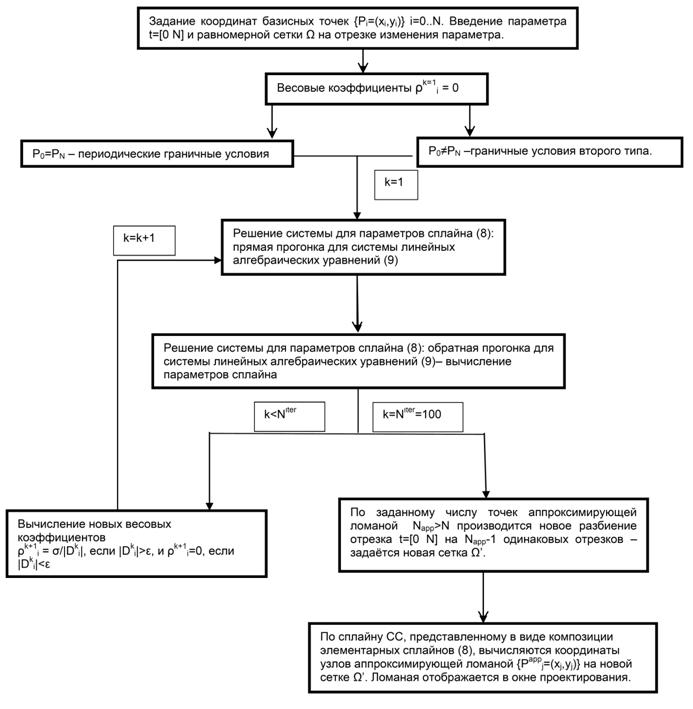
рис. 6 Алгоритм построения сглаживающего сплайна
На рис. 4-6 приведены
алгоритмы построения рассмотренных выше сплайнов.
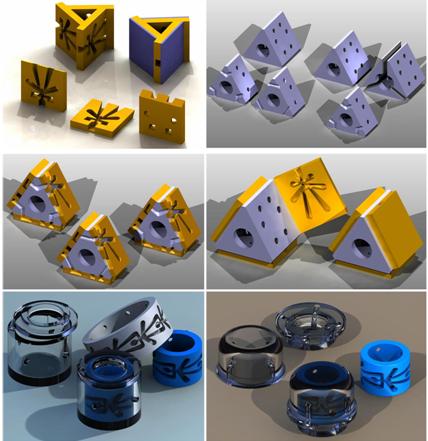
рис. 7 Примеры 3D-моделей из базы данных САПР «СТРУЯ»
На основе исходных
данных (принципиальных и монтажных схем), сформированных в подсистеме «СТРУЯ-2D», производится построение 3D-моделей в подсистеме «СТРУЯ-3D» и формирование базы данных 3D-моделей элементарных модулей струйной
техники (рис. 7).
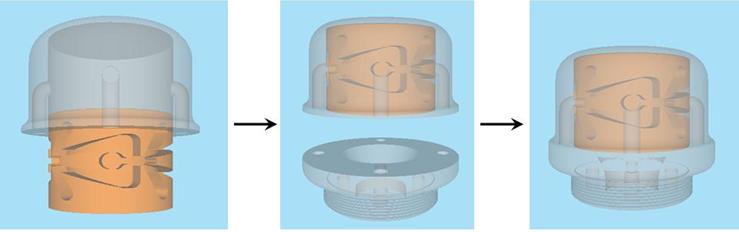
рис. 8 Виртуальная сборка устройств автоматики на
элементах струйной техники
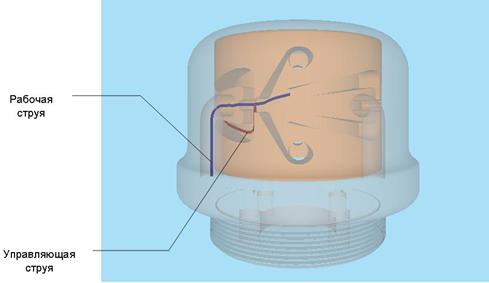
рис. 9
Моделирование потока газовой струи
Сформированная база данных используется для проектирования конструкций
средств автоматики: выполняется виртуальная сборка (рис. 8) [4], моделирование
динамики струи (рис. 9) и т.п.
Таким образом,
разработана структурная схема САПР «СТРУЯ», база данных элементов струйной
техники, содержащая их принципиальные и монтажные схемы, циклограммы работы, 3D-модели. Кроме того, разработано
математическое обеспечение, алгоритмы и программное обеспечение для реализации сплайнов
трех типов, а также для виртуальной сборки и моделирования работы струйных
элементов в системе «СТРУЯ».
Литература
1. Ахметзянов А.В., Ермолаев А.И., Касимов А.М., Лункин Б.В.
Измерительные вычислительные системы для контроля и учета продукции газодобывающих
и газотранспортных предприятий. // Газовая промышленность, 2006. - № 10. – С.
69 – 73
2.
Е.В.
Шишкин, А.И. Плис. Кривые и поверхности на экране компьютера. Москва,
«Диалог-МИФИ», 1996.
3. А.А. Самарский, Е.С. Николаев. Методы решения сеточных уравнений. Москва, «Наука», 1978.
4. Е.И. Артамонов, А.В. Балабанов, В.А. Ромакин Операции на виртуальных моделях объектов
машиностроения / Материалы XXXVI международной конференции IT+SE'09. Запорожье:
Открытое образование, 2009. Приложение к журналу "Открытое образование".
С. 70-72.