Исследование динамических
процессов 3D-моделей в среде Matlab
В.М. Понятский,
нач. сект., к.т.н, доц.,
Э.Н. Давыдов,
нач. отд.,
В.Г. Федорищева,
вед. инж.,
А.В. Осадчий,
инж.,
И. В. Кислинский,
инж.-программ.,
ГУП «КБП», kbkedr@tula.net, г. Тула
В настоящее
время для моделирования механических систем используются и успешно эксплуатируются
системы автоматизированного проектирования (CAD) SolidWorks [1] и Pro/Engineer,
а также система математического моделирования (CAE) MatLab [2].
Пакет
SolidWorks, равно как и пакет Pro/Engineer, обеспечивает высокую эффективность
и качество разработки твердотельных моделей деталей и узлов механизмов.
Пакет
Matlab расширяет возможности САПР SolidWorks и Pro/Engineer в части
динамического моделирования. Благодаря включенной в его состав графической
среде имитационного моделирования Simulink можно объединять элементы различной
физической природы (электрические, гидравлические, пневматические, механические
и др.) и моделировать движение механизмов и машин. Пакет расширения Simulink
SimMechanics позволяет моделировать механизмы, состоящие из множества твердых
тел и их компонентов – соединений, ограничителей движения, управляющих
элементов и датчиков движения, т.е. проводить динамический анализ конструкций механизмов. При этом возможно как
создание 3D–моделей в этой среде с помощью специального
редактора, так и трансляция 3D–моделей из САПР SolidWorks или Pro/Engineer в среду Matlab.
Геометрическая массо-инерционная модель преобразуется в массо-инерционную
динамическую модель. Сопряжения между телами заменяются степенями свободы. Полученная
динамическая модель в результате экспорта 3D-модели дорабатывается в
соответствии с задачей исследования. Проводится формирование сил взаимодействия
между механическими телами, введение средств регистрации величин перемещения
механических тел и действующих на них сил и моментов. В среде Matlab
обеспечена возможность 3D визуализации функционирования механической
системы.
В CAD-системе
SolidWorks имеется возможность подключения дополнительных
расчётных модулей для проведения узконаправленного инженерного анализа: или
расчёт прочности (модуль COSMOSWorks), или расчёт кинематики (COSMOSMotion) и т.д
В
CAD-системе Pro/Engineer имеется встроенный пакет для инженерного анализа Pro
Mechanical, который позволяет производить расчёт механических систем как в
статике, так и в динамике.
Система
MatLab позволяет избежать недостатков модулей инженерного анализа,
разработанных специально для определённых CAD-систем за счет возможности
проведения динамического анализа с учетом взаимодействия подсистем различной
физической природы.
Трансляция
3D-модели в среду MatLab осуществляется при помощи встроенного в CAD-систему
транслятора в два этапа [3] (рис. 1).
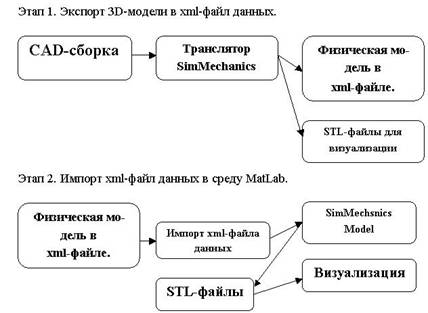
рис. 1 Этапы трансляции конструкторской 3D-модели в
математическую модель MatLab
На
первом этапе осуществляется экспорт 3D-модели из SolidWorks или Pro/Engineer в
xml-файл данных. Для этого необходимо сохранить сборку в файле с расширением
*.xml. Получившийся xml-файл данных содержит в себе всё описание сборки:
массоинерционные характеристики деталей и характеристики их соединений.
На
втором этапе в среде MatLab осуществляется генерация динамической модели через
импорт полученного xml-файла с помощью команды import_physmod или
mech_import.
В процессе трансляции геометрической 3D-модели в динамическую модель
осуществляется преобразование сопряжений между деталями в степени свободы этих
тел.
После трансляции получается математическая модель в среде MatLab. Не все
соединения деталей в SolidWorks и Pro/Engineer могут быть правильно
интерпретированы CAD-транслятором. Те соединения, которые CAD-транслятор не
распознал, он заменяет жёстким соединением Weld. В дальнейшем в MatLab возможно
заменить нераспознанные соединения и задать необходимые степени свободы для деталей.
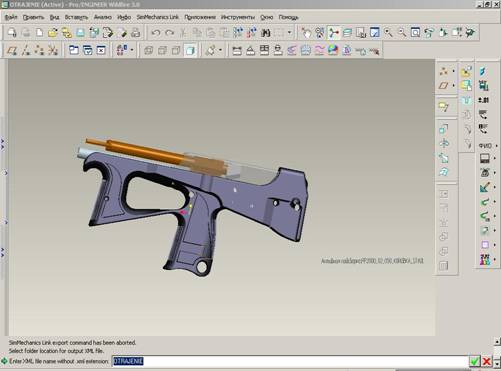
Рассмотрена
задача анализа динамики вылета гильзы [4]. Исходная 3D-модель приведена на
рисунке 2.
а)
б)
рис.
2 Исходная 3D-модель исследуемого
механизма: а - в CAD SolidWorks; б - в CAD Pro/Engineer
Схема
действующих сил на гильзу в патроннике при её ударе об упор и вылете в боковое
отверстие приведена на рисунке 3.
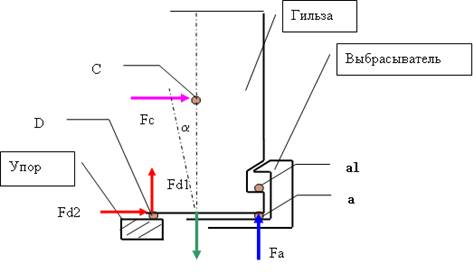
рис. 3 Схема действия сил
Обобщённая
сила, действующая между двумя телами – линейная функция векторов относительного
перемещения ![]() и относительной
скорости движения
и относительной
скорости движения ![]() этих тел, определяется выражением:
этих тел, определяется выражением:
![]() (Н) (1)
(Н) (1)
где ![]() – относительное
перемещение тел (м);
– относительное
перемещение тел (м); ![]() – текущее расстояние между
телами (м);
– текущее расстояние между
телами (м); ![]() – расстояние между
телами в момент начала взаимодействия (м);
– расстояние между
телами в момент начала взаимодействия (м); ![]() – относительная
скорость перемещения тел (м/с);
– относительная
скорость перемещения тел (м/с); ![]() – текущая скорость тел
друг относительно друга (м/с);
– текущая скорость тел
друг относительно друга (м/с); ![]() – скорость тел друг
относительно друга в момент начала взаимодействия (м/с);
– скорость тел друг
относительно друга в момент начала взаимодействия (м/с); ![]() – коэффициент модуля
упругости материала тел (Н/м);
– коэффициент модуля
упругости материала тел (Н/м); ![]() – коэффициент
демпфирования (Н/м/с);
– коэффициент
демпфирования (Н/м/с); ![]() – коэффициент,
определяющий знак функции
– коэффициент,
определяющий знак функции ![]() ;
;![]() – признак,
определяющий наличие действия силы
– признак,
определяющий наличие действия силы ![]() . Если сила
. Если сила ![]() действует, то признак
равен единице, иначе признак равен нулю.
действует, то признак
равен единице, иначе признак равен нулю.
Взаимодействие
гильзы и выбрасывателя обеспечивается приложением сил (1) в точке контакта деталей.
Изменение
угловых координат осевой линии гильзы вычислялось по следующим формулам (направляющие
косинусы):
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Моделирование
движения гильзы можно разделить на три этапа:
·
движение гильзы в патроннике (движение до удара об упор);
·
взаимодействие гильзы с выбрасывателем и упором (момент удара гильзы об
упор);
·
отражение гильзы и вылет в боковое отверстие.
Существенной
проблемой моделирования движения гильзы является обеспечение прямолинейного
движения гильзы в стволе до удара и её свободное пространственное движение
после удара.
После
трансляции 3D–модели в среду MatLab в полученной модели проведены следующие
доработки:
·
смоделировано движение гильзы в стволе до удара (гильза в зацеплении с
выбрасывателем, плунжером и остовом затвора с заданной степенью свободы –
поступательное движение вдоль ствола) за счет воспроизведения воздействия на
гильзу от пороховых газов;
·
смоделирован удар гильзы об упор с воспроизведением всех действующих сил
и моментов при их взаимодействии;
·
смоделировано свободное движение гильзы в пространстве после удара за
счет отключения силы, реализующей зацепление гильзы с выбрасывателем, плунжером
и остовом затвора;
·
визуализация результатов (координат, сил и моментов) осуществляется при
помощи добавленных виртуальных осциллографов.
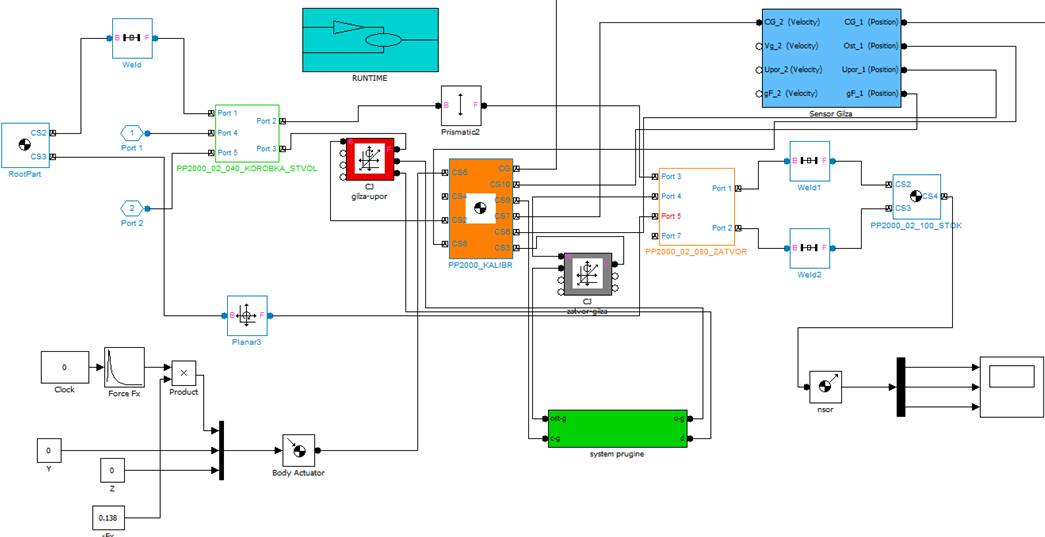
Кроме
того, разработана подсистема, управляющая заданием сил взаимодействия гильзы с
выбрасывателем и упором (рис. 4).
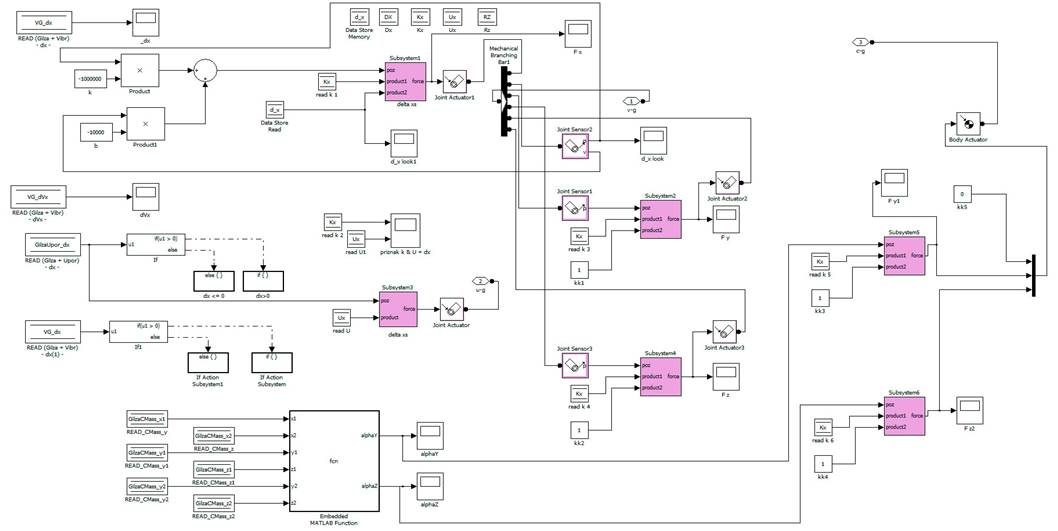
рис. 4 Подсистема, управляющая заданием сил
взаимодействия гильзы с выбрасывателем и
упором
На
рисунке 5 приведена доработанная динамическая модель в среде MatLab.
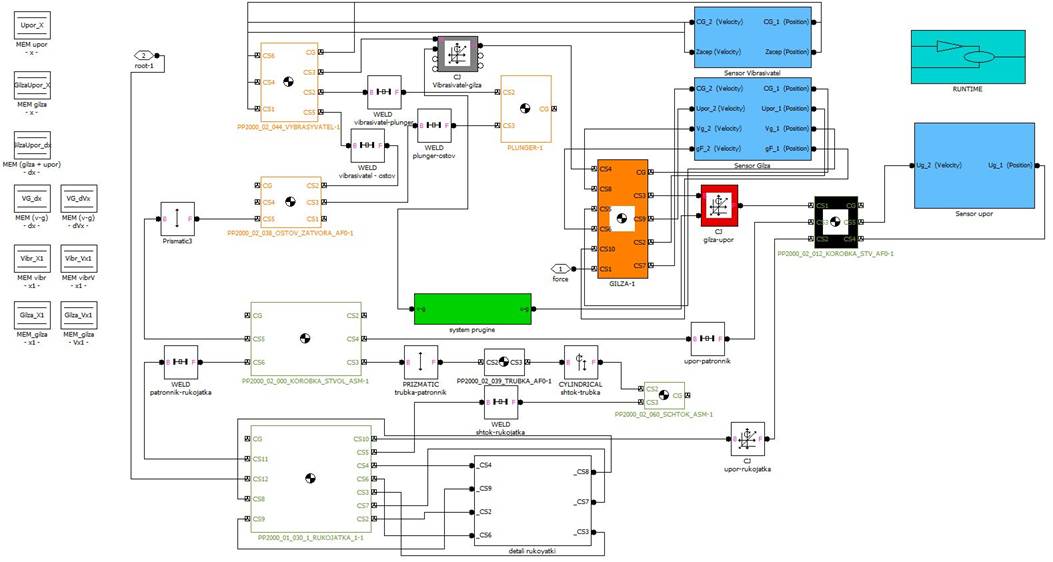
а)
б)
рис.
5 Доработанная динамическая модель в
среде MatLab, полученная из: а - CAD SolidWorks; б - CAD Pro/Engineer
Отличия
моделей Matlab, полученных из CAD SolidWorks и CAD Pro/Engineer,
связаны с разной компоновкой 3D-моделей.
В
момент, когда гильза ударяется об упор, ее продолжает тянуть назад
выбрасыватель и создаёт крутящий момент для гильзы. Гильза меняет траекторию и
вылетает в боковое отверстие (рис. 6).
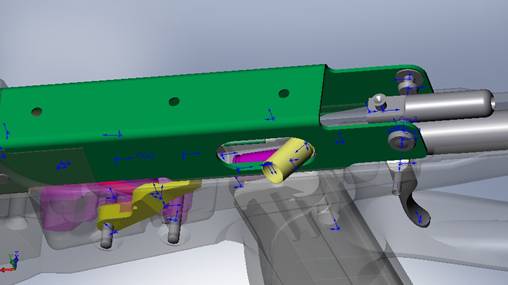
а)

б)
в)
рис.
6 Моделирование вылета гильзы: а -
3D–модель CAD SolidWorks; б - 3D–модель в среде Matlab; в - линейные координаты
гильзы в среде Matlab
Использование
предложенного подхода позволяет на этапе проектирования механических систем снизить
затраты на их производство.
Литература
1. Алямовский А.А. SolidWorks
/ COSMOSWorks 2006 / 2007. Инженерный анализ методом конечных элементов. – М: ДМК, 2007. – 764с.
2. Лазарев Ю. Моделирование
процессов и систем в MATLAB: Пакеты Signal Processing Tools, Control Toolbox и Simulink
с библиотеками Aerospace, SimPowerSystems, SimMechanics: Учебное пособие. –
СПб.: Питер, 2005. – 512 с.
3. Понятский В.М.,
4. Давыдов Э.Н.,