Разработка средств визуализации и контроля
движения режущего инструмента для станков с ЧПУ
Р.Л. Пушков,
н.с., pushkov@ncsystems.ru
ГОУ ВПО МГТУ «Станкин», Москва
П.А. Никишечкин,
инж. 1 кат., petrnikishechkin@gmail.com
ФГБОУ ВПО МГТУ «СТАНКИН», г. Москва
Аннотация
Статья посвящена исследованию
возможностей повышения визуализации процесса механообработки на станках с ЧПУ,
а также разработки компонента для визуализации и контроля движения режущего инструмента
для системы ЧПУ AxiOMA Ctrl.
Abstract
The article deals
with possibilities to improve the visualization of machining
on CNC machines, as well as the
development component to visualize and control the movement
of cutting tools for CNC AxiOMA Ctrl.
Растущие
темпы развития станков с ЧПУ во всем мире ставит высокие требования точности
позиционирования режущего инструмента, а также его перемещения в рабочей зоне.
В связи с этим, в современной металлообрабатывающей промышленности, контроль за
движением режущего инструмента, а также визуализация данного процесса является
актуальной задачей, требующей корректного решения.
На сегодняшний день в МГТУ «Станкин»,
на кафедре Компьютерные Системы Управления активно ведутся разработки
отечественной многофункциональной системы ЧПУ с открытой модульной архитектурой
AxiOMA Ctrl. Архитектура данной системы числового программного управления
технологическим оборудованием включает терминальную часть, работающую в
машинном времени (как правило, ОС Windows с платформой .Net) и ядро,
функционирующее в реальном времени (Linux RT). [1]
Одним
из основных факторов, влияющих на конкурентоспособность разрабатываемой системы
ЧПУ с иностранными аналогами, является надежность и максимальное удобство работы
с системой. Это достигается путем создания различных режимов работы системы
ЧПУ, таких, как Автоматический, Ручной, Толчковый. Каждый режим позволяет в
своей мере решать поставленные задачи. Также, немаловажным фактором является
высокая степень визуализации непосредственного процесса обработки. Это может
быть решено путем создания графического компонента, способного в реальном
времени отображать траекторию движения режущего инструмента. Появляется задача разработки
средства визуализации и контроля движения режущего инструмента, интегрируемого
в систему ЧПУ AxiOMA Ctrl.
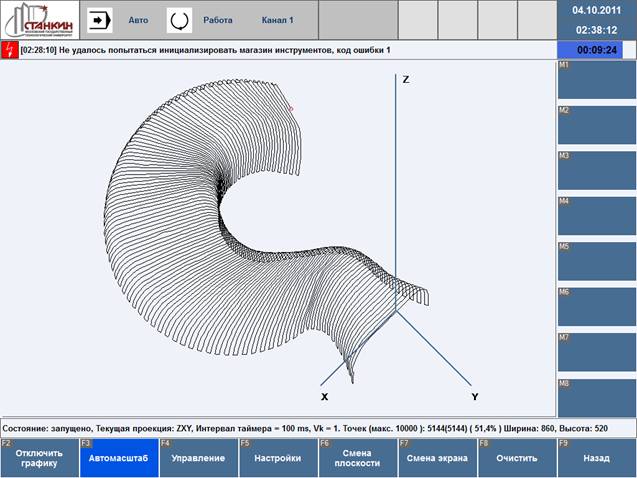
рис. 1. Основной вид экрана в
графическом режиме системы ЧПУ AxiOMA
Ctrl
Для
решения поставленной задачи, в Автоматическом режиме системы ЧПУ AxiOMA Ctrl был создан подрежим «Графика», предназначенный для
представления оператору траектории движения режущего инструмента в реальном
времени. Данное средство позволяет отображать траекторию в трехмерном пространстве
координат X, Y, Z. На рисунке 1 показана
работа данного компонента в процессе отрисовки траектории движения инструмента
во время работы управляющей программы для фрезерного станка.
Данный
компонент имеет набор команд для управления визуализацией. Все эти команды
отображены на F-клавишах данного режима системы ЧПУ. Назначение функциональных клавиш в режиме Графики:
·
F2 – Включение/отключение
считывания данных и их отрисовки;
·
F3 – Включение/отключение
функции автомасштабирования под размеры экрана получившейся 3Д-фигуры.
·
F4 – Управление графикой.
При нажатии на данную клавишу производится отображение панели с функциональными
клавишами для изменения положения и масштаба отображаемой траектории (рис. 2);

рис. 2. Функциональные клавиши
системы ЧПУ для управления визуализацией траектории
·
F5 – Запуск окна с
настройками графики. Настройки графики, вид окна которых показан на рисунке 3,
включает в себя следующие параметры отображения графики: автоматический запуск
отрисовки при входе в данный режим, автомасштабирование, отображение 3Д-контура
траектории, текущая проекция, частота съема данных, максимальное количество
добавляемых в буфер точек, а также настройки визуальных компонентов, а именно
цвета, шрифты, размеры и т.д.
·

рис. 3. Вид окна оператора в
режиме настроек графики
·
F6 – Функциональная клавиша
для изменения видимой на экране проекции траектории. При нажатии на нее
производится отображение панели с функциональными клавишами как для выбора трехмерной
проекции отображения, так и двухмерной проекции (рис. 4, 5).
·
![]()
рис. 4. Функциональные клавиши
при установке различных типов 3D проекций
![]()
рис. 5. Функциональные клавиши
при установке различных типов 2D проекций
графики
·
F7 – Клавиша для
переключения между видами экранов. На данный момент реализовано два типа экрана:
основной вид (рис. 1), а также расширенный вид, включающий в себя отображение
как траектории движения, так и управляющей программы, координат инструмента в
числовом виде, а также значения подачи и частоты вращения шпинделя (рис. 6);
·
F8 – Очистка графики.
·
F9 – Выход в автоматический
режим.
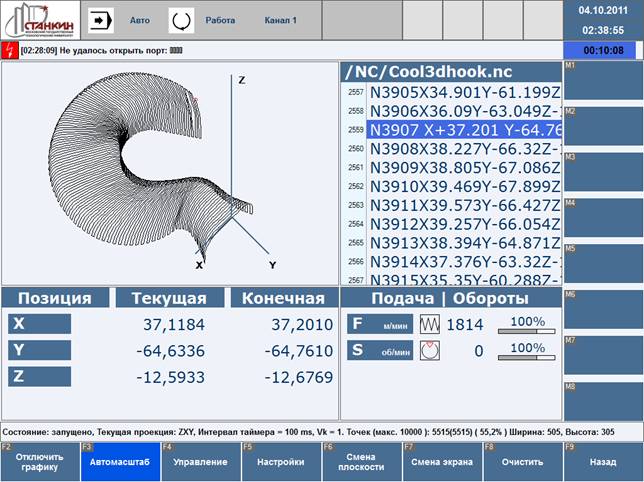
рис. 6. Вид расширенного экрана
оператора в режиме графики
Графический
компонент имеет свой интерфейс с набором функций, необходимых для корректного
отображения траектории движения инструмента, а также управления графикой.
Данный интерфейс может быть использован как для разработанного графического
компонента, так и для возможных новых модификаций средств визуализации. Это
делает разрабатываемой ПО универсальным и многофункциональным. Интерфейс
графического компонента включает в себя следующие основные методы:
· Start()
– функция запуска считывания координат и отрисовки по ним траектории движения;
· Stop()
– функция остановки отрисовки траектории;
·
Clear() – функция очистки графики;
· RepaintAll() – метод полной перерисовки графики (обновление);
· StateRotate(string TypeRotate) – установить тип
отображаемой проекции;
· Zoom(float KZoom) – увеличить/уменьшить масштаб путем задания
коэффициента масштабирования KZoom;
· Pan(float deltaX, float deltaY)
– перемещение отображаемой траектории на величины deltaX и deltaY по осям экрана X и Y соответственно.
· Rotate(float angleX, float angleY,
float angleZ) – вращение траектории на
произвольный угол вокруг осей X, Y и Z.
· AutoScale()
– подогнать размер отображаемой траектории под экран графики;
· SaveToFile() – сохранить графику в XML – файл;
· LoadFromFile() – загрузить сохраненную ранее фигуру из специализированного XML-файла.
Передача
данных из ядра системы ЧПУ в терминальную часть, в подрежим «Графика»
осуществляется в таймере, с заданной частотой передачи.
Интеграция
данного средства визуализации и контроля в систему ЧПУ позволяет наглядно
отображать траекторию движения инструмента на экране системы ЧПУ, что является
важным аспектом при работе оператора, значительно повышает удобство проверки
правильности написания управляющей программы, а также снижает риск получения
бракованного изделия путём проверки работы управляющей программы без выполнения
непосредственной обработки изделия.
Литература
2.
Сосонкин В.Л.,
Мартинов Г.М. Программирование систем числового программного управления. – М. Логос,
2008. – 344 с. + компакт-диск. ISBN 978-5-98704-296-8. 8.
3.
Сосонкин В.Л.,
Мартинов Г.М. Системы числового программного управления: Учеб. пособие. – М.
Логос, 2005. – 296 с. ISBN 5-98704-012-4.