Система регулирования состояния объекта в вейвлет-среде с
учётом задающего
воздействия в виде технологически сосредоточенной многомерной переменной
Д.Б.
Федосенков,
доц., к.т.н., доц.,
Е.И. Князьков,
аспир.,
О.В. Цыганенко,
аспир.,
Б.А. Федосенков,
проф. кафедры, д.т.н.,
проф., raf@kemtipp.ru,
КемТИПП, г. Кемерово
В данной работе решается вопрос управления процессом
дозирования (непрерывным или дискретным) в рамках системы автоматического
регулирования при формировании глобальной обратной связи по сигналу дозирования
в многомерном формате в вейвлет-среде (для повышения семантической составляющей
процесса регулирования). При этом задающее воздействие в системе формируется
виртуальным задатчиком также в многомерном формате в виде распределения
Вигнера, соответствующего номинальному режиму дозирования.
The issues of
controlling the dosing process (continuous or discrete type) within a system of
automatic control having the global feedback over the multi-dimensional dosing
signal in a wavelet medium (to increase the controlling process semantic
component) have been solved in the paper. In this case the setting action at
the system input is formed with a virtual setting device in the same
multi-dimensional format as a certain pattern dosing regime Wigner distribution
map.
Процесс
управления динамикой и мониторинга текущих материалопотоковых сигналов ![]() заключается в отслеживании визуализированных результатов
ВПС-декомпозиции (декомпозиции вейвлет-поиска соответствия) на время-частотной
плоскости [1]. При этом полная энергия сигналов в виде ее распределения Вигнера
формируется путем сложения (суммирования) распределения Вигнера каждого из
выбранных атомов.
заключается в отслеживании визуализированных результатов
ВПС-декомпозиции (декомпозиции вейвлет-поиска соответствия) на время-частотной
плоскости [1]. При этом полная энергия сигналов в виде ее распределения Вигнера
формируется путем сложения (суммирования) распределения Вигнера каждого из
выбранных атомов.
Распределение
Вигнера сигнала ![]() определяется как
определяется как

Расчёт распределений
Вигнера по всему разложению сигнала дает:
 ,
,
где перекрестное распределение ![]() вейвлет-функций
вейвлет-функций ![]() и
и ![]() определяется в виде
определяется в виде

Следует
заметить, что при расчете модифицированных сигналов материалопотоков в процессе
online-мониторинга
– для сохранения фактической картины распределения энергии сигнала – перекрестные
члены распределения, характеризующие виртуальную составляющую энергии,
аннулируются. С целью поверки достоверности расчетов отображения определенных
сигналов на время-частотной плоскости в рамках распределения Вигнера,
параллельно проводились расчеты энергетической плотности сигналов в формате
распределения Чуи-Уилльямса [2].
Алгоритмическая
схема процедуры обработки материалопотокового сигнала и процесса управления
объектом – смесеприготовительным агрегатом (СА) – приведена на рис. 1. Здесь блок
(1) – собственно СА. На первом этапе производится регистрация значений сигнала x(t)
и ввод их в ПЭВМ с помощью интерфейсной схемы сопряжения (блок 2). Далее
производится обработка полученных значений по ВПС – алгоритму (3) на основе
непрерывно пересчитываемой время-частотной карты Вигнера. Карта рассчитывается
по результатам разложения анализируемого сигнала материалопотока на
время-частотные атомы (ВЧА) с помощью вейвлет-преобразования. В результате
каждого пересчета карты в памяти компьютера формируется массив данных. Стартовая карта, полученная в начале работы СА
в установившемся режиме, соответствует начальным, или номинальным условиям
синхронизации и синфазным параметрам дозаторов в составе блока дозаторов. С
течением времени (обычно через несколько минут работы БДУ) амплитудно-частотные
параметры дозаторов меняются, происходит «разбежка» их режимов по частоте.
Программа управления последовательно извлекает каждое значение из полученного
массива данных по «вертикали» (частоте) и по «горизонтали» (времени),
сравнивает его с заданным «пороговым» значением, а затем, выбрав наибольшее и
наименьшее значения положения ВЧА, формирует условные «прямоугольные окна»
(атомные фреймы) значений с учетом размерного допуска. Таким образом,
полученные в результате первого цикла работы (или акта регистрации) системы
атомные фреймы соответствуют номинальному режиму работы СА. Далее, при
следующих циклах работы агрегата, каждый раз производится регистрация новых
значений x(t)
(2), обработка их по ВПС – алгоритму (3) и анализ полученных массивов данных.
Снова формируются граничные текущие значения каждого ВЧА и сравниваются со
значениями параметров соответствующих им атомных фреймов по всем координатам.
Для поддержания стабильного коэффициента неоднородности смеси следует стабилизировать
положение ВЧА в пределах заданной области (окна) на карте Вигнера с заданной
допускаемой погрешностью. Если не наблюдается выхода ВЧА за допустимые пределы,
то происходит переход к модулю (2) регистрации нового значения x(t).
При выходе ВЧА за заданные пределы атомного фрейма формируются необходимые
управляющие воздействия (4) на смесительный агрегат (1) через модули обратной
связи (5 и 6). Исследования показали, что эффективное управление агрегатом уже
возможно при возникновении «разбежки» значений результирующих показателей
вектора параметров в диапазоне 10..15% по время-частотной карте – это
обстоятельство обусловлено наличной ресурсной мощностью цифрового процессора в
составе мониторингового комплекса (тактовая частота процессора Р-IV системного блока в
составе мониторингового комплекса – 2,8-3,0 ГГц).
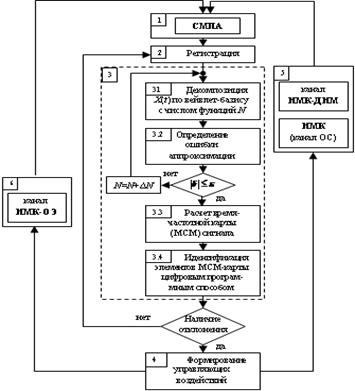
рис. 1 Схема обработки сигнала и управления агрегатом: ИМК – интерфейс мониторингового
комплекса; ДИМ – исполнительные механизмы блока дозаторов; ОЭ – отражающий
элемент канала внутреннего рецикла
Формирование
управляющих воздействий в формате двумерных модифицированных сигналов производится
следующим образом. На рис. 2. приведена схема реализации процедуры формирования
управляющих воздействий, указанной в блоках 3,4,5 (рис. 1).
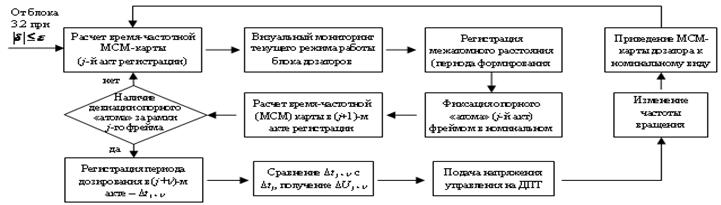
рис. 2. Алгоритмическая схема
формирования управляющих воздействий
В соответствии с
приведенным алгоритмом:
- В
 -том акте измерения расхода в номинальном режиме
фиксируется первый (левый) опорный «атом» (для сигналов порционных
дозаторов – рис. 3, а) и б)). Здесь номинальному режиму соответствует рис.
3 а, текущему (возмущенному) режиму – рис. 3 б; при этом рабочая частота
возросла в два раза – до 2Гц, скважность формирования доз выросла с 2,86
до 4,17, что соответствует снижению скорости роста производительности
дозатора.
-том акте измерения расхода в номинальном режиме
фиксируется первый (левый) опорный «атом» (для сигналов порционных
дозаторов – рис. 3, а) и б)). Здесь номинальному режиму соответствует рис.
3 а, текущему (возмущенному) режиму – рис. 3 б; при этом рабочая частота
возросла в два раза – до 2Гц, скважность формирования доз выросла с 2,86
до 4,17, что соответствует снижению скорости роста производительности
дозатора.
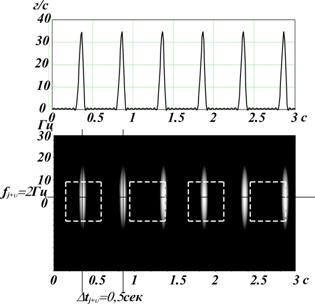
Для дозатора непрерывного типа
(шнекового или спирального) в ![]() -том акте регистрации фиксируется время-частотный атом, имеющий
вид дельта-функции (функции Дирака) δ(ω
- ωdi), где ωdi – угловая частота переменной составляющей
материалопотокового сигнала i - го дозатора – см. рис. 4.
-том акте регистрации фиксируется время-частотный атом, имеющий
вид дельта-функции (функции Дирака) δ(ω
- ωdi), где ωdi – угловая частота переменной составляющей
материалопотокового сигнала i - го дозатора – см. рис. 4.
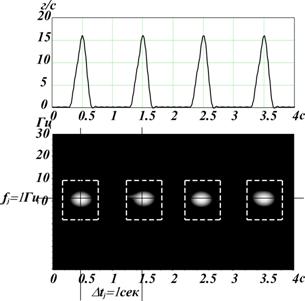
а) б)
рис. 3. Осциллограммы
и их время-частотные карты, соответствующие номинальному и текущему
(возмущенному) режимам работы дозатора порционного типа
- Измеряется
период сигнала
 для дозаторов
дискретного типа,
для дозаторов
дискретного типа,  - для дозаторов непрерывного типа.
- для дозаторов непрерывного типа. - Формируется
-фрейм (окно) опорного «атома», определяющий (-ее)
область его допустимых перемещений, соответствующих номинальному режиму
работы дозатора. Через определенное время (оно определяется скоростью
расчета время-частотной карты) в новом технологическом файле фиксируется
левый опорный
 -й «атом» и сопоставляется со старым
-й «атом» и сопоставляется со старым  фреймом.
фреймом. - Если
наблюдается «невыход» опорного «атома» за пределы -го фрейма, то переходим к пункту 1, и т.д. – по циклу –
до (j+ν)-го акта регистрации.
- Если
произошел выход нового (j+ν)-го
«атома» за пределы старого j-го фрейма, то измеряется расстояние (по
 ) между новым опорным (j+ν)-ым
и правым смежным «атомом» (j+ν)-го
уровня, то есть определяется
) между новым опорным (j+ν)-ым
и правым смежным «атомом» (j+ν)-го
уровня, то есть определяется  , где
, где  – количество
последующих актов регистрации время-частотных карт (карт Вигнера), начиная
с (j+1)
акта; (j+ν) – номер акта регистрации,
при котором впервые зафиксирован факт выхода (предельной девиации)
опорного «атома» за границы фрейма -го уровня.
– количество
последующих актов регистрации время-частотных карт (карт Вигнера), начиная
с (j+1)
акта; (j+ν) – номер акта регистрации,
при котором впервые зафиксирован факт выхода (предельной девиации)
опорного «атома» за границы фрейма -го уровня.

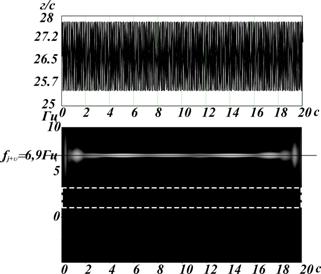
рис. 4. Осциллограммы и их
время-частотные карты, соответствующие номинальному и текущему (возмущенному)
режимам работы дозаторов непрерывного типа (здесь – спирального дозатора).
Номинальному режиму соответствует рабочая частота вращения спирали 72 об/мин,
возмущенному – 570 об/мин
- Сопоставляется
 (
( ) и (
) и ( ) с напряжениями постоянного тока
) с напряжениями постоянного тока  и
и  , то есть определяются номинальное и текущее,
соответствующее возмущеному режиму, напряжения на обмотке якоря двигателя постоянного
тока. Зависимости периодов (частот) в сигналах, формируемых дозаторами, от
режимов их работы представлены на рис. 7.2.17.
, то есть определяются номинальное и текущее,
соответствующее возмущеному режиму, напряжения на обмотке якоря двигателя постоянного
тока. Зависимости периодов (частот) в сигналах, формируемых дозаторами, от
режимов их работы представлены на рис. 7.2.17.
7.
Определяется
напряжение рассогласования ![]() , которое подается на обмотку якоря двигателя постоянного
тока дозатора, приводя последний к номинальному состоянию по частоте вращения.
, которое подается на обмотку якоря двигателя постоянного
тока дозатора, приводя последний к номинальному состоянию по частоте вращения.
Таким
образом, реализуется автоматическое управление (автоматическая стабилизация)
режимом работы соответствующего дозирующего устройства путем дискретного
формирования обратной связи в ждущем режиме.
Зависимости рабочих
частот или периодов дозирования от режимов работы дозирующих устройств
(напряжения питания) позволяют проводить интерактивное моделирование процессов
смесеприготовления и управлять динамикой режимов работы дозаторов. При этом
разработанная векторная автоматизированная система управления их динамикой
включает в себя N
скалярных цифровых сегментов.
Каждый из них имеет
структуру системы управления с обратной связью, которая формируется на базе
многомерной переменной в виде время-частотного отображения (модифицированного
одномерного сигнала материалопотока – МСМ-карты). Цепь обратной связи
формируется из четырех блоков; первые три реализованы на цифровой основе с
применением методов адаптивной аппроксимации и преобразования одномерных
сигналов в многомерные, четвертый – на цифро-аналоговой, с определением текущих
значений напряжения, подаваемого в виде сигнала рассогласования через
электромашинный усилитель на объект управления – двигатель
постоянного/переменного тока; последние образуют цепь прямого канала системы
автоматического регулирования.
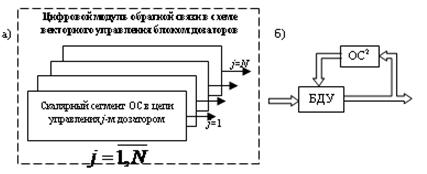
рис. 5. Векторное представление
каналов управления БДУ:
а) отображение вейвлет-обратной
связи; б) векторная САР текущим режимом
БДУ с квадратичной ОС
На рис. 5 в
обобщенной форме представлены фрагменты цифрового модуля обратной связи в схеме
управления блоком дозаторов – БДУ (рис. 5а) и локальной векторной САР его
режимами работы (рис. 5б).
В данной работе
решается вопрос управления процессом дозирования (непрерывным или дискретным) в
рамках системы автоматического регулирования при формировании глобальной
обратной связи по сигналу дозирования в многомерном формате в вейвлет-среде
(для повышения семантической составляющей процесса регулирования), причём
задающее воздействие в системе формируется виртуальным задатчиком также в
многомерном формате в виде распределения Вигнера, соответствующего номинальному
режиму дозирования.
Такой способ подачи
на узел сравнения «эталонной картины» требуемого режима дозирования существенно
упрощает структуру векторной цепи (в силу наличия блока мультикомпонентного
дозирования) обратной вейвлет-связи, избавляя последнюю от наличия в ней
векторного модуля преобразования параметров дозирования как функций рабочей (текущей) карты Вигнера
по каждому из каналов в текущее рабочее напряжение на исполнительном механизме соответствующего
дозатора. Данный модуль оперирует базами данных тарировочных характеристик в
системе «период / частота дозирования – напряжение на двигателе» для каждого
технологического канала дозирования, которые сами по себе - в силу
специфичности их определения – содержат различные ошибки корреляции и в
функциональном отношении являются узко направленными.
Наличие же задания в
форме, соответствующей формату регулируемой
координаты (расхода ингредиента), полученной в вейвлет-среде в виде
распределения Вигнера, снимает вышеуказанную проблему. При этом рассогласование
двух многомерных сигналов находится как разница либо моментов времени (для
случая дискретного дозирования порционного типа), либо частот (для случая
непрерывного дозирования), определяющих локализацию соответствующих время-частотных
атомов, отображенных на сравниваемых картах.
Кроме применения в управлении традиционными
технологиями, описанный метод может быть
использован для реализации функции мониторингового слежения за динамикой
подвижных объектов в наземной, воздушной и подводной средах и их сопровождения.
Литература
1.
Федосенков,
Б.А. Управление смесеприготовительным агрегатом на базе вейвлет-преобразований
/ Б.А. Федосенков, А.С. Назимов, А.В. Шебуков // Автоматизация и современные технологии.
Автоматизация научно-исследовательских и производственных процессов. – 2004.
– №8. – C. 7–13.
2.
Cohen, L.
Time-frequency distributions – A review / L. Cohen // Proc. IEEE. – 1989. –
Vol. 77, № 7. – P. 941-981.