Методика исследования ударных нагрузок конструкторских
проектов САПР SolidWorks в среде имитационного
моделирования Simulink пакета MATLAB
В.М. Понятский
начальник сектора, к.т.н, доцент,
Г.И. Колесников
начальник отделения,
В.Г. Федорищева
ведущий
инженер
ГУП «КБП», е-mail: kbkedr@tula.net, г.Тула
В
развитие подхода к исследованию конструкторских проектов САПР SolidWorks в среде имитационного моделирования Simulink пакета Matlab
[1, 2] рассматривается возможность моделирования ударных воздействий между телами
с помощью пружины, подключаемой в момент удара.
Библиотека
Force Elements пакета SimMechanics, который является
расширением среды Simulink и предназначен для моделирования
механических систем, включает два блока, позволяющих подключать между телами
определенные виды сил и вращающих моментов: Body Spring
& Damper и Joint Spring
& Damper. Первый из них подключается непосредственно между
телами, а второй – к соединению между телами.
Обобщенная
сила, действующая между двумя телами - линейная функция относительного вектора
призматического перемещения этих тел r и относительной скорости перемещения v.
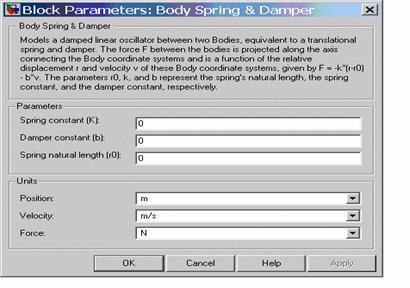
Блок Body Spring & Damper моделирует
только одну силу, действующую между двумя телами по оси r их соединения:
F = -k(r – r 0) – bv, (1)
где r – относительное
перемещение (изменение длины пружины), r0 – начальная длина пружины,
k - жесткость пружины, b - константа демпфирования.
Общая физическая система, которую представляет эта
модель силы - комбинация пружины и демпфера.
На
рисунке 1а показано окно параметров блока Body Spring & Damper. Оно имеет две вкладки: Параметры
(Parameters)
и Единицы измерения (Units).
Чтобы задать линейную силу, необходимо в окне параметров блока Body Spring & Damper ввести
постоянные параметры r0, k, и b.
Жесткость пружины k и константа демпфирования b должны
быть неотрицательными. Чем больше жесткость элементов механизма, тем больше
коэффициент k и соответственно больше действие силы. Константа
демпфирования b
определяет скорость затухания пружинной силы между телами.
а)
б)
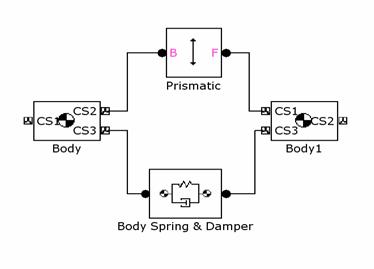
рис. 1
Блок Body Spring & Damper:
а)окно параметров б) пример подключения блока
В
полях Position,
Velocity,
Force вкладки Units
задаются единицы измерения перемещения r, относительной скорости v и силы пружины F.
При
моделировании удара между телами с помощью блок силового элемента Body Spring & Damper нужно
дополнительно задать поступательную (призматическую) степень свободы между
этими телами. Чтобы представить поступательное движение между телами, можно
использовать любой блок Joint, содержащий не менее одного призматического
примитива.
На
рисунке 1б приведен пример подключения блока Body Spring
& Damper между двумя телами, которые могут перемещаться
относительно друг друга по оси X. Соединение и сам силовой блок
подключены к параллельным портам тел.
Блок
Joint Spring & Damper
позволяет приложить различные независимые силы/вращающие моменты
пружины-демпфера в местах соединения тел, подключая элемент силы к каждому призматическому
(поступательному) или вращательному примитиву.
Затухающая
линейная сила, приложенная к призматическому соединению между телами, определяется
уравнением (1).
Затухающий
вращающий момент, приложенный к вращательному примитиву между телами:
t
= -k(θ - θ0) – bω, (2)
где k – угловая жесткость пружины, θ0 –
начальный угол, ω - угловая скорость вращательного движения, b - константа
демпфирования.
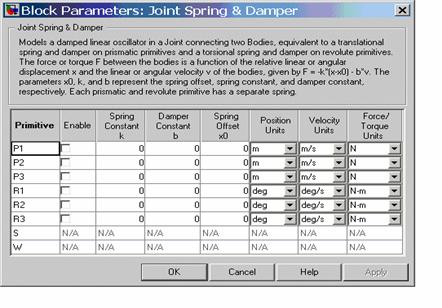
На
рисунке 2а показано окно параметров блока Joint Spring &
Damper.
Вкладка Primitive
перечисляет активные примитивы в соединении, с которым связан блок. P
представляет призматический примитив, R - вращательный примитив, S - сферический примитив и W
- жесткое соединение без степеней свободы.
Чтобы
приложить силу или привести в действие вращающий момент на любом примитиве в
соединении, нужно выбрать флажок Enable рядом с названием примитива в столбце
Primitive, а также в полях Spring Konstant k,
Damper Konstant b,
Spring Offset x0,
указать необходимые значения жесткости пружины, константы демпфирования и
начальной длины пружины (начальный угол скрученности пружины).
а)
б)
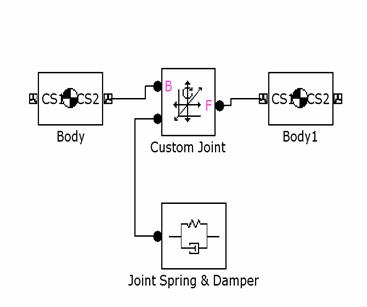
рис. 2
Блок Joint Spring & Damper:
а) окно параметров б) пример подключения блока
В полях Position Units, Velocity Units,
Force/Torque Units задаются единицы
измерения позиции, линейной (угловой) скорости перемещения тел и пружинных
сил/пружинных вращающих моментов.
На
рисунке 2б приведен пример подключения блока Joint Spring & Damper к
соединению между телами.
Моделирование
силы между телами с помощью блока Joint Spring & Damper имеет несколько преимуществ перед блоком Body Spring& Damper:
-
можно задать различный закон силы, с различной длиной пружины, жесткостью
пружины и константой демпфирования для каждого из примитивов соединения;
-
силы пружины и демпфера действуют на каждый примитив независимо.
Это
позволяет задавать пружинные и демпфирующие силы, которые действуют независимо
в двух или трех измерениях, в отличие от силы, задаваемой блоком Body Spring &
Damper,
действующей только по единственной оси между центрами систем координат тел.
Рассмотренные
стандартные блоки библиотеки силовых элементов пакета SimMechanics моделируют
линейную силу/вращающий момент между телами с постоянными коэффициентами жесткости
и демпфирования. Для решения задачи моделирования удара с помощью пружины необходим
блок с переменными по времени коэффициентами. Получить такой блок можно следующим
образом:
-
реализовать стандартными средствами Simulink уравнения линейной (1) или угловой пружины (2),
задав в них коэффициенты жесткости k и демпфирования b как функции времени;
-
снять маску со стандартного блока библиотеки Force Elements пакета SimMechanics и создать дополнительные
входы в подсистему для ввода переменных по времени коэффициентов.
На рисунках 5 и 6 показаны
блоки Body Spring & Damper,
позволяющие подавать на их входы переменные по времени коэффициенты жесткости k и
коэффициент демпфирования b пружины.
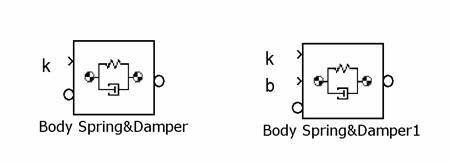
рис. 3
Блоки Body Spring & Damper с
переменными коэффициентами жесткости и демпфирования
Блок пружины с переменными
по времени коэффициентами жесткости и демпфирования можно подключить к уже имеющемуся
соединению между телами. Если в модели такого соединения нет, необходимо
добавить стандартное соединение Custom Joint,
в состав которого входят три призматических и три вращательных примитива, и к
нужному примитиву подключить блок пружины. Если нужно подключить к одному
соединению несколько пружин (учитывающих линейные и угловые жесткости тел по
нескольким осям), на соединении создаются несколько параллельных портов и к ним
подключаются пружины.
Приведенный метод
применения пружины с переменными по времени коэффициентами использован для
оценки сил, возникающих при ударах в исполнительном элементе (сервоприводе) летательного аппарата (ЛА).
Моделирование удара
проводилось в среде имитационного моделирования Simulink. При моделировании
учитывались линейные и угловые жесткости элементов конструкции. Расчеты жесткостей проводились с помощью
расчетного модуля САПР SolidWorks COSMOSWorks.
Simulink-модель исполнительного элемента получена с помощью
CAD-транслятора пакета SimMechanics из 3D-модели
в SolidWorks. Сначала исходная 3D-модель исполнительного
элемента транслируется в xml-файл, а потом xml-файл
импортируется в среду Simulink, где и создается блочная
модель механизма [1, 2].
3D-модель
исполнительного элемента в среде SolidWorks приведена на рисунке 4.
Давление
внутри цилиндров исполнительного элемента действует на поршни, передается на
полуось и вызывает ее поворот. При выходе полуоси на максимальный угол
отклонения с ненулевой угловой скоростью происходит ударное взаимодействие
полуоси с упором. В конструкции возникают ударные и вибрационные нагрузки.
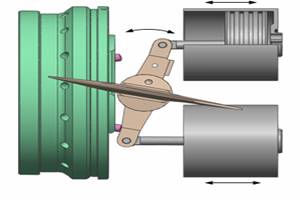
рис. 4 3D-модель
исполнительного элемента ЛА в SolidWorks
В
процессе трансляции в xml-файл установлено, что
некоторые сопряжения исходной сборки не поддерживаются CAD-транслятором. Были проведены
доработки в 3D-модели (сопряжение” касательность” между парой
деталей было заменено сопряжением “совпадение”, а сопряжение “симметричность”
между двумя плоскостями, равноотстоящими от центральной, на два сопряжения
“расстояние”; также были удалены погашенные сопряжения), после чего трансляция
прошла успешно.
На
рисунке 5 приведена Simulink-модель исполнительного элемента.
Для
подачи управляющих воздействий на поршни цилиндров в модель добавляются блоки
привода Body Actuator, а для измерения угловых и
линейных перемещений - блоки датчиков Body Sensor и Joint Sensor. Указанные блоки находятся в библиотеке Sensors
& Actuators пакета SimMechanics.
Для
определения ударных нагрузок в элементах конструкции в Simulink-модели исполнительного элемента
к соединениям между телами подключены пружины с переменным по времени коэффициентом
жесткости. До удара коэффициент жесткости k = 0, в момент удара
принимает свое номинальное значение. Критерием удара считается выход полуоси на
упоры. Коэффициент демпфирования принимается равным нулю. В процессе
моделирования работы исполнительного элемента в соответствии с уравнениями
пружины (1) и (2) формируется упругая сила/вращающий момент, которые через блок
привода Joint Actuator воздействуют на соединение

рис. 5
Модель исполнительного элемента ЛА в среде Simulink
между телами. Согласно третьему закону Ньютона, эта
сила/момент действует на оба тела в противоположных направлениях с равными по
величине значениями. Результаты моделирования: линейное (угловое) сжатие
пружины, скорость сжатия, величина силы удара, угол поворота полуоси, угловая
скорость поворота, сила давления на поршень отображаются на осциллографе Scope и
записываются в файл в рабочее пространство MATLAB.
На рисунке 6 приведена Simulink-модель
исполнительного элемента с блоками управляющих воздействий на цилиндры, блоком
измерения угла и угловой скорости поворота полуоси, а также с блоками,
реализующими подключение линейных и угловых пружин.
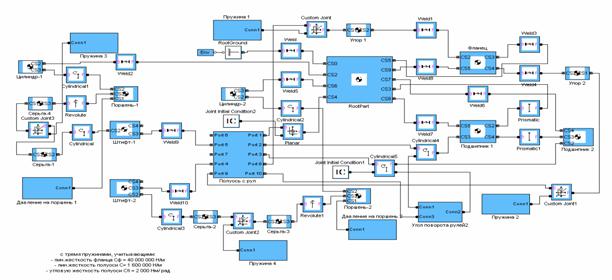
рис. 6
Модель исполнительного элемента ЛА в среде Simulink для моделирования ударных
нагрузок
На
рисунке 7 приведены результаты оценки сила удара, изменяющейся во времени,
полученной в процессе моделирования функционирования исполнительного механизма
ЛА при различных управляющих воздействиях (давление в цилиндрах).
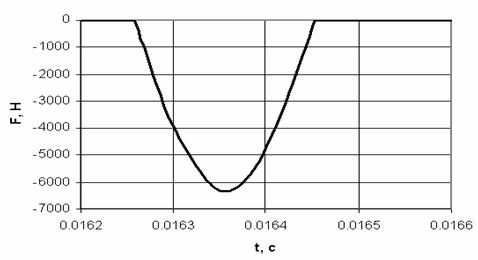
рис. 7
Результат моделирования ударной нагрузки
Таким
образом, с использованием предложенного подхода по полученной Simulink-модели
из 3D конструкции САПР SolidWorks можно оценить максимальную
величину и динамику ударных нагрузок, возникающих в процессе функционирования
механизма при различных управляющих воздействиях.
Литература
1. Понятский
В.М., Колесников Г.И.,
Федорищева В.Г. Исследование конструкторских 3D проектов летательных
аппаратов SolidWorks в среде моделирования MATLAB //
Сборник материалов Всероссийской научно-технической конференции «Фундаментальные
основы баллистического проектирования». 23-26 июня 2008 г. - СПбг.: БГТУ. -
2008. В 2 томах. - Т. 2. - С.126 – 130.
2. Понятский
В.М., Колесников Г.И.,
Федорищева В.Г. Разработка конструкторских проектов в среде SolidWorks с использованием среды имитационного моделирования MATLAB
// Труды международной конференции «Перспективы использования новых технологий
и научно-технических решений в рракетно-космической и авиационной
промышленности». AEROSPACE-2008. 20-24 августа 2008 г. – М.: ИПУ. - 2008. -
С. 48 – 49.