Проектирование распределения работ между роботами и
людьми при автоматизации производства
В. М.
Чадеев,
вед. научн. сотр., док. техн. наук., проф,
ИПУ РАН, chavama@yandex.ru, Москва.
1. Техническая постановка задачи
При
автоматизации технологических процессов возникает задача оптимального
распределения работ между людьми и автоматами. Оптимальность понимается в
смысле затрат времени человека на изготовление продукции, включая затраты на
изготовление автоматов. Везде ниже термины «стоимость продукции» и «затраты
человека на изготовление продукции» следует воспринимать как синонимы.
Количество
автоматов занятых в промышленности
стремительно возрастает. Общее количество действующих в промышленности
роботов превысило миллион. В наиболее роботизированной Японии уже около 3%
рабочей силы заменили роботы. Поскольку эти же роботы используются и для
производства роботов, приходится учитывать эффект самовоспроизведения. Это
усложняет процесс проектирования технологического процесса. Дело в том, что
проектирование технологического процесса в общем случае – задача переборная.
Для решения таких задач не всегда помогают даже большие вычислительные машины.
Однако
оптимальное распределение работ между роботами и людьми при наличии элементов
самовоспроизведения обладает некоторыми свойствами, которые упрощают проектирование.
Управление стоимостью изделия происходит с помощью выбора подходящего уровня
автоматизации отдельных видов технологических операций. Уровень автоматизации α
изменяется от 0 до 1. Когда α равно 0, все делает человек, когда α равно 1, все делает робот. Так вот оказалось
оптимум лежит на границе области определения, то есть все компоненты вектора
автоматизации могут быть равны только 0 или 1.
Основная
схема производства, которая будет анализироваться, показана на рис. 1. Согласно
этой схеме в производстве изделий участвуют и роботы (тонкие стрелки) и люди
(широкие стрелки). Для изготовления любого изделия необходимо выполнить
определенный набор технологических операций, например, завинтить n винтов. Каждая
технологическая операция полностью определяется четырьмя параметрами: временем
выполнения этой операции человеком - a,
вероятностью ее правильного выполнения человеком – p, временем выполнения этой операции роботом - b, вероятностью ее
правильного выполнения роботом – q. Оптимальное распределение
работ между роботами и людьми
определяется именно этими параметрами.
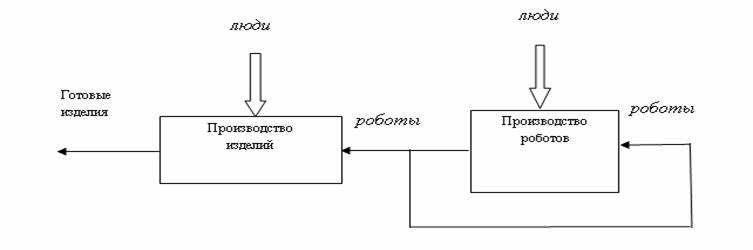
рис. 1 Схема
автоматизированного производства
Будут
рассмотрены детерминированная и
вероятностная теории. Вначале будет рассмотрена
теория, в которой будет предполагаться, что брак при выполнении
технологических операций полностью отсутствует. При этом будут получены оценки
минимальной стоимости изделия.
2. Формальная постановка задачи
2. 1. Детерминированная
теория
Пусть
для изготовления какой-либо
продукции и роботов достаточно
использовать m видов технологических операций.
Естественно, не обязательно, чтобы все эти виды операций были
использованы и при производстве
роботов и при производстве
продукции. Предположим также, что все или некоторые из этих m
видов операций могут быть выполнены
роботами. Нашей целью
будет решение задачи
об оптимальном распределении работ между роботами и людьми, которые минимизируют суммарные затраты человеческого
труда на производство продукции и роботов.
Общие
затраты человеческого труда на изготовление всей продукции без
использования роботов равны
 (1)
(1)
где ai
‑ время
выполнения технологической операции
i-го вида человеком, ki ‑
количество операций i-го вида, необходимое для изготовления продукции (некоторые
ki могут быть равны нулю).
При использовании роботов и рабочих стоимость
изготовления всей продукции будет равна
![]() , (2)
, (2)
где βi степень автоматизации технологической
операции i-го вида при производстве продукции; α ‑
вектор степени автоматизации технологических операций при производстве роботов; bi ‑
затраты времени робота на выполнение
технологической операции i-го вида; l(a) ‑ стоимость единицы
рабочего времени робота, которая равна
 , (3)
, (3)
где nj ‑
число операций j-го вида,
необходимое для изготовления робота; αi ‑
степень автоматизации технологической операции i-го
вида при производстве роботов; T
‑ ресурс робота.
Отметим, что первый член в правой части (2)
представляет собой затраты человеческого
труда непосредственно на изготовление данной продукции, а второй
- затраты времени роботов на изготовление данной продукции, умноженной на стоимость единицы рабочего
времени робота. Стоимость единицы рабочего времени робота (2) получается
делением затрат человека на изготовление робота (в числителе) на остаток
ресурса после вычета затрат на мамовоспроизведение.
Относительно общих
затрат на производство продукции F(a,b) для детерминированных систем, когда все операции
выполняются наверняка, имеет место следующее утверждение
Теорема
1. Минимум
затрат на производство продукции F(a, b) достигается, когда компоненты векторов a b равны только 0
или 1.
Очевидно, что минимум F(a,b) по a достигается при тех же значениях аргумента a, которые минимизируют l(a), поскольку
a
входит только в l.
Как было показано в [1], минимум l(a) доставляет вектор a, компоненты которого суть 0
или 1. С другой стороны, j ‑ линейная функция a и, следовательно, минимум j по a достигается на границе, то есть при значениях компонент вектора a равных 0
или 1.
Эти два факта и доказывают утверждение.
Только
для детерминированных систем имеет место и следующее утверждение.
Теорема
2. Для детерминированных систем минимум
затрат на производство продукции достигается,
когда все компоненты j и bj m-мерных векторов степени автоматизации технологических операций
при производстве роботов и степени автоматизации при производстве
продукции b, для которых nj
и
kj вместе не равны нулю, одинаковы,
то есть j=bj.
Доказательство
не приводится из-за недостатка места. Заметим только, что оно проводится «от
обратного».
2. 2. Вероятностная теория
Рассмотрим теперь более общий случай, когда вероятности правильного
выполнения технологических операций не равны 1. В этом случае будут действовать
другие законы. Покажем, что существуют случаи, когда для одного и того же вида
технологических операций минимальные общие затраты будут иметь
место, если эта операция
автоматизируется при производстве роботов и выполняется вручную при производстве продукции.
В случае, когда вероятность правильного выполнения отдельных технологических операции не
равна 1, средние затраты на изготовление продукции
возрастут в соответствии с формулой
 , (4)
, (4)
где вероятность правильного выполнения всех
технологических операций Q(b) при изготовлении продукции
задается формулой
 , (5)
, (5)
а стоимости единицы рабочего времени робота l(a) для вероятностного случая примет
вид
 , (6)
, (6)
где
 (7)
(7)
В
этих формулах: qj ‑
вероятность правильного выполнения операции j-го
вида человеком; pj ‑ роботом;
остальные обозначения были введены
ранее.
В тех случаях, когда вероятность правильного выполнения технологических операций меньше единицы (а
это всегда так), следует минимизировать функцию (4), которая учитывает, что
часть готовой продукции уйдет в брак. При этом следует учитывать следующее.
Доказано, что для минимизации затрат все компоненты векторов автоматизации a и b суть только
0 и 1.
Стоимость единицы
рабочего времени робота в вероятностном случае (7) отличается от стоимости
единицы рабочего времени робота в детерминированном случае (3) тем, что в нее входят средние
затраты времени и робота и человека на изготовление годного робота, что
и учитывается множителем P(a).
На рис. 2 приведен пример зависимости стоимости изделия F(a, b) от времени жизни робота T. Очевидно, что чем больше
время жизни робота (ресурс), тем дешевле единица его рабочего времени. В
примере рассмотрен случай, когда для изготовления используется только один вид
операций, например, операция завинчивания винта. Этот единственный вид операций
используется как при изготовлении роботов, так и при изготовлении другой
продукции. Напомним, что один вид операции (например, завинчивание винта) может
выполняться много раз, а именно n раз при изготовлении
робота и k раз при изготовлении продукции.
рис. 2. Зависимость
стоимости изделия от времени жизни робота
Возможны четыре случая
F(00) – и роботы и продукция изготавливается
вручную;
F(01) -
роботы изготавливается вручную, а производство продукции
автоматизировано, т.е. она изготавливается
роботами;
F(10) - продукция изготавливается вручную, а
производство роботов автоматизировано, т.е. они изготавливаются роботами;
F(11) - и роботы и продукция изготавливаются
роботами.
На рис. 2 по оси ординат отложена стоимость
продукции, а по оси абсцисс ресурс робота. Очевидно, что с увеличением ресурса
стоимость единицы рабочего времени снижается и, в соответствии с (4), снижается
и стоимость продукции. При этом, что очень важно, изменяется и оптимальное
распределение работ между роботами и людьми.
Из
рисунка видно, что если ресурс робота меньше 5,6, то при производстве робота
технологические операции должны быть автоматизированы, а при производстве
продукции выполняться вручную. Если же ресурс робота больше 5,6, то все технологические
операции и при производстве робота и при производстве продукции должны быть
автоматизированы, При этом будет достигнута минимальная стоимость продукции.
2. Основные результаты
Рассмотрена система автоматизированного производства, использующая
элементы самовоспроизведения. Показано, что когда вероятность правильного
выполнения технологической операции и роботом и человеком равна единице (т.е.
брак отсутствует), то для минимизации затрат времени рабочего необходимо,
чтобы:
1.
Однотипные технологические операции выполнялись или целиком роботом, или
целиком человеком как при производстве роботов, так и при
производстве другой продукции.
2.
Однотипные технологические операции должны иметь одинаковый уровень
автоматизации как при производстве роботов, так и при производстве другой
продукции.
Когда вероятность правильного выполнения технологической операции роботом и человеком меньше единицы (т.е.
когда брак присутствует), то для минимизации затрат времени рабочего возможно,
что одинаковые технологические операции
будут при производстве робота автоматизироваться, а при производстве другой
продукции выполняться вручную и наоборот.
Полученные
результаты не следует воспринимать как догму. При проектировании
технологических процессов, кроме приведенных выше четырех факторов, учитывающих
время выполнения технологической операции и вероятность брака, в реальной жизни
действует еще масса других. Это может повлиять на распределение работ. Наиболее
существенно влияет иерархия. Была рассмотрена одноуровневая схема. На практике
все изделия изготавливаются из узлов, а узлы предварительно контролируются.
Подробнее [1-4]. При этом одни и те же технологические операции, выполненные в
разных узлах, считаются разными операциями.
Литература
1, Основы управления
технологическими процессами. Под ред. Н.С. Райбмана. М., Наука. 1978.
2. Чадеев В.М. Управление изготовлением роботов для
производства роботов. Автоматика и
телемеханика. 1998, №12.
3. Чадеев В.М. Системы самовоспроизведения роботов с
реальным контролем. Автоматика и
телемеханика. 1999, №6.
4. Чадеев В.М. Стратегия автоматизации. Автоматизация в промышленности 2003, №2-№4.
5. Чадеев В.М. Механическая
автоматизация. Автоматизация в
промышленности 2008, №5.