Система
моделирования и анализа рельефа местности
В.А. Ромакин,
н.с., к.т.н.,
А.И. Разумовский,
с.н.с., к.т.н..
ИПУ им. В.А.
Трапезникова РАН, г. Москва
В настоящее время моделирование рельефа местности и его
последующее исследование по полученным моделям становятся неотъемлемой частью
теоретических и экспериментальных изысканий в картографии, науках о Земле
(геология, тектоника, гидрология, океанология, климатология и т.д.), в
экологии, земельном кадастре и инженерных проектах. Компьютерная обработка
пространственных данных находит широкое применение при анализе распространения
участков загрязнений, в моделировании месторождений, а также во многих проектах
по устойчивому развитию территорий.
Начало исследований в этой области было положено еще в XIX веке
работами немецких ученых-географов. Сегодня результаты, полученные компьютерной
обработкой массивов данных по территории и цифровые модели рельефа (ЦМР), в
корне изменили подход к двум основным функциям моделирования – топографическому
анализу и визуализации. Геоинформационные системы и
технологии в настоящее время предоставляют исследователям широкие возможности
синтеза результатов моделирования и нетопографических
тематических данных [2].
Основным методом моделирования рельефа является построение
триангуляционных моделей (TIN) с последующей линейной интерполяцией или
построение сеточных моделей методом Кригинга. В
качестве примера можно привести работу Р. Латтуада и
Дж. Рейпера [3]. Такие модели используются в проектах
и приложениях исследовательской группой GeoFrance3D [4]. Главное свойство
TIN-модели состоит в использовании ее при генерации дополнительных данных для
интерполяции. Пример подобной техники представлен в работе Д. Хейцингера и Х. Кагера [5] о
получении корректных ЦМР с использованием оцифрованных изолиний.
Однако насущной потребностью является создание специализированной
интерактивной системы трехмерного моделирования и анализа рельефа местности,
предназначенной в первую очередь для автоматизации решения выбранного круга
задач, - от создания особо точных двумерных и трехмерных
атласов и карт местности, до имитации полета
по заданной траектории над выбранной местностью.
Основные
функциональные задачи разрабатываемой системы моделирования рельефа местности были сформулированы следующим образом:
-
создание рабочего пространства моделирования;
-
загрузка информации о высотах точек местности из различных форматов
данных;
-
создание триангуляционной модели (TIN-модели) рельефа по
исходной информации о высотах точек местности;
-
построение сеточной модели (DEM-модели) рельефа на основе TIN-модели
либо с помощью метода Кригинга;
-
построение профилей и горизонталей на основе TIN- и DEM-моделей
рельефа;
-
формирование графического представления TIN- и DEM-моделей
рельефа, горизонталей и профилей;
-
оценка точности построения TIN- и DEM-моделей
рельефа, горизонталей и профилей по опорным точкам;
-
сглаживание TIN- и DEM-моделей рельефа методом Гримсона и сплайн-интерполяцией;
-
разбивка DEM-модели на участки по номенклатурам, объединение
нескольких DEM-моделей;
-
сложение и вычитание DEM-моделей со статистической
оценкой результата;
-
конвертирование TIN- и DEM-моделей
рельефа, горизонталей и профилей в различные форматы.
В
соответствии с этим разработана система Relief Studio,
позволяющая обрабатывать значительные объемы исходных данных, а также
формировать и визуализировать трехмерные карты, сочетая при необходимости
изображения рельефа местности в различных форматах. Система позволяет решать
основные задачи анализа построенной модели рельефа: оценка точности по
контрольным точкам, построение профилей, изолиний и изоконтуров
и т.д. Все полученные результаты можно экспортировать в популярные графические
форматы, в том числе форматы геоинформационных систем
и САПР.
Структура
системы включает блоки создания, обработки, и анализа модели рельефа,
блок визуализации и блок моделирования полета по местности (рис. 1).
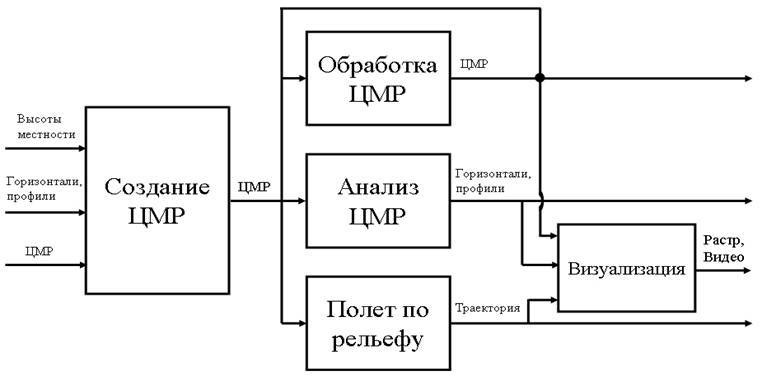
Рис. 1. Структура системы
Блок создания
ЦМР обеспечивает загрузку информации о высотах точек местности из различных форматов
данных (включая DXF, DM, GRID) в рабочее пространство
системы. В качестве исходных данных используются массивы отдельных точек
местности, горизонтали, gps-треки и пр. На
основе исходной информации создается сеточная модель местности с
использованием триангуляции Делоне с последующей линейной интерполяцией (рис.
2), либо методом Кригинга. Для триангуляционной
модели используется структура данных «узлы и
треугольники», в которой для
каждого треугольника хранятся три указателя на образующие его узлы (исходные
точки) и три указателя на смежные треугольники. Для построения триангуляции
применяется один из трех итеративных алгоритмов (простой, с динамическим и
статическим кэшированием). Процесс построения сеточной функции сводится к
вычислению значений интерполяционной функции в точках регулярной сети по
значениям хаотически расположенных экспериментальных точек данных.
Блок обработки моделей
рельефа служит для сглаживания построенных моделей рельефа методом Гримсона
и сплайн-интерполяцией, разбивки DEM-модели на участки по
номенклатурам и объединения нескольких DEM-моделей в одно целое, а
также для сложения и вычитания DEM-моделей со статистической
оценкой результата.
Блок визуализации предназначен для
отображения различных типов данных (исходные точки, триангуляционная и сеточная
модели, горизонтали, профили, изоконтуры, подписи) и
быстрой навигации по модели рельефа.
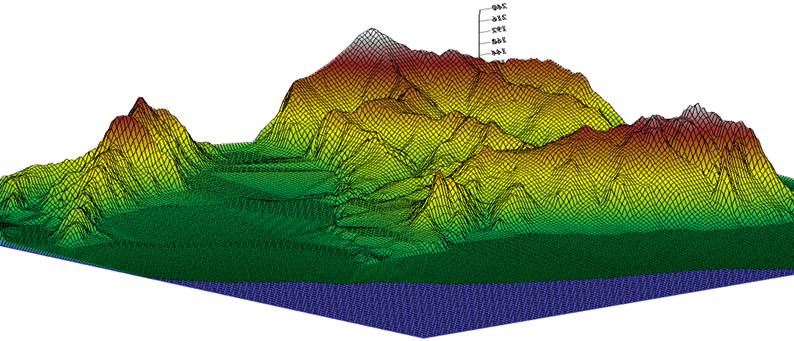
Рис.2.
Визуализация сеточной модели
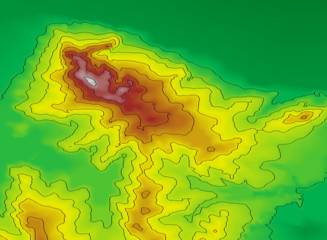
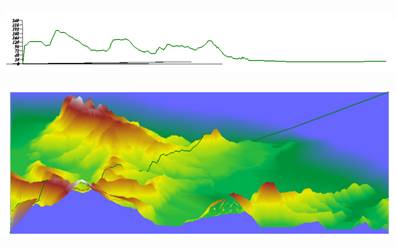
Блок анализа моделей рельефа позволяет
оценить точность построения триангуляционных и сеточных моделей по массиву
опорных точек, а также построить горизонтали, профили и изоконтуры
(рис. 3 и 4).
|
|
|
|
Рис. 3.
Построение горизонталей |
Рис. 4.
Построение профилей |
Одной
из отличительных особенностей системы является наличие блока настройки и имитации полета камеры по заданной траектории.
Под траекторией камеры понимается последовательность шагов, каждый из которых
характеризуется положением камеры, ее ориентацией (направление взора, или
объектива), а также скоростью полета. Каждому шагу соответствует определенный
кадр (графическое изображение модели рельефа), формирующийся с учетом
параметров камеры. Полет по траектории представляет собой последовательную по
шагам визуализацию кадров с необходимой скоростью.
Функции
данного блока включают добавление и удаление отдельных шагов траектории,
редактирование шагов (в том числе в режиме просмотра результирующего кадра),
сохранение и загрузка траектории полета из внешнего файла
и собственно имитация полета по заданной траектории. Кроме того, имеется
возможность быстрого создания типовых траекторий, включая полет вокруг заданной
точки, полет вдоль ломаной линии с линейной интерполяцией ориентации камеры
(рис. 5), сплайн-траектория.
Данный
инструментарий позволяет, например, имитировать полет авиационной или ракетной
техники по заданной траектории, демонстрировать модель оператору или заказчику.
|
|
||
|
|
|
|
|
|
|
|
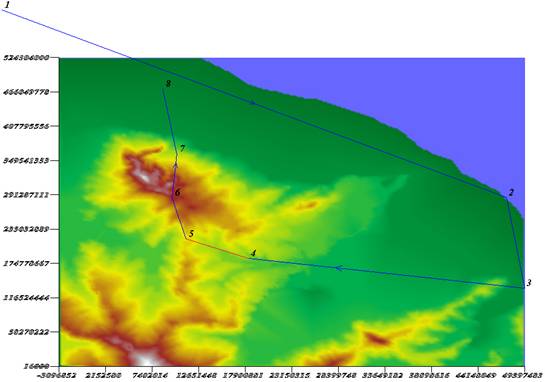
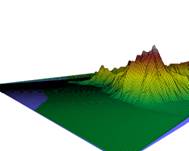
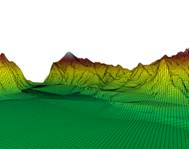
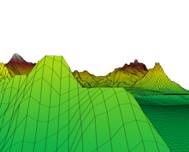
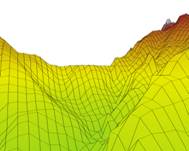
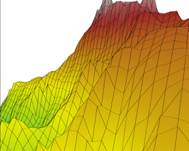
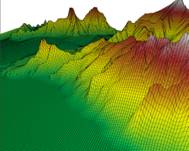
Рис. 5.
Моделирование полета вдоль ломаной линии и отдельные кадры, сняты при полете
Наличие
готовых функциональных решений, таких как сеточный фильтр, статистика, быстрая
навигация по карте и пр., легко доступных через всплывающее меню и горячие
клавиши, избавляет пользователя от необходимости выбора сложных путей решения
отдельной задачи. В то же время удобные и гибкие средства среды исследователя
позволяют легко адаптировать систему к множеству потребностей пользователя в
различных отраслях производства, где имеется необходимость в геоинформационном автоматизированном управлении.
Литература
1. Pike R.J. Geomorphometry-progress, practice, and
prospect // Z. Geomorph. Suppl. 1995. Vol. 101. P. 221-238.
2. Moore I.D., Grayson R.B., Ladson A.R. Digital
terrain modeling - a review of hydrological, geomorphological and biological
applications // Hydrol. Proc. 1991. N 5, P. 3-30.
3. http://www.iah.bbsrc.ac.uk/phd/gisruk95.html
4. http://www.brgm.fr/geofrance3d/geofrance3d.html
5. Heitzinger D., Kager H. Hochwertige Gelandemodelle
aus Hohenlinien durch wissensbasierte Klassifikation von Problemgebieten //
Photogrammetrie-Fernerkundung-Geoinformation. 1999. N 1, P. 29-40.