Принципы разработки стендов для исследования
алгоритмов управления техническими объектами
М.Х. Дорри, зав. лабораторией, д.т.н., профессор, Москва, А.А. Рощин, с.н.с., к.т.н., доцент, Москва
Можно высказать следующие основные принципы,
реализация которых важна при построении
исследовательских стендов:
1. Универсальность. Возможность
использования для достаточно большого количества однородных изделий и проектов.
2. Гибкость. Имеется в виду возможность
в интерактивном режиме видоизменять параметры модулей, вмешиваться в алгоритмы
расчета.
3. Полнота. В состав стенда необходимо
включать достаточное количество разнородных взаимозаменяемых моделей блоков и
систем.
4. Достоверность. Включаемые в состав
стенда модули должны снабжаться
характеристиками, указывающими на область их применимости.
5. Виртуальная среда разработки.
Исследуемые процессы должны быть максимально возможно наглядно отображены на имеющихся мониторах (в виде графиков,
мультипликации и т.п.).
6. Временной масштаб. Возможность
исследования процессов в разных временных масштабах.
7. Сетевая структура. Возможность
подключения нескольких компьютеров в общую сеть и обмена расчетными данными
между ними.
8. Связь с объектом. Это свойство
вызвано необходимостью отработки алгоритмического и программного обеспечения
устройств.
9. Сквозное проектирование. Имеется
ввиду CAD-CAM технология в создании систем управления, под которой подразумевается
автоматизация перехода от исследовательских алгоритмов к кодам конкретных
вычислительных устройств.
В ИПУ РАН создан программный комплекс РДС (Расчет Динамических Систем), который во многом облегчает задачу создания исследовательских стендов. РДС удовлетворяет семи из перечисленных принципов и идет работа над реализацией остальных.
Программный комплекс РДС позволяет моделировать системы, представленные в виде набора связанных между собой блоков, каждый из которых может содержать программу расчета, определяющую взаимодействие с другими блоками системы и реакцию на действия пользователя. Группы функционально связанных блоков могут быть объединены в составные блоки (подсистемы), которые могут содержать собственную программу в дополнение к программам находящихся внутри подсистемы блоков. Кроме того, дополнительная программа расчета может быть, при необходимости, связана со всей системой. Все программы блоков загружаются из внешних библиотек, которые могут быть модифицированы независимо от главной программы.
Иерархическая структура моделируемых систем, примененная в РДС, позволяет строить алгоритмы расчета наиболее удобным для конкретной системы образом. Данные, непосредственно относящиеся к блоку системы, могут обрабатываться программой расчета этого блока. Данные, общие для группы блоков, могут обрабатываться программой расчета подсистемы. Наконец, данные, относящиеся ко всей схеме в целом, могут обрабатываться программой системы.
При
этом РДС позволяет достаточно легко организовать взаимодействие этих программ
между собой. Такой подход позволяет решать достаточно обширный класс задач моделирования.
Для пользователя моделируемая система выглядит как структурная схема, в которой связи между блоками изображаются графически в виде линий. Внешний вид блоков может изменяться в процессе моделирования, что позволяет более наглядно информировать пользователя о результатах расчета и состоянии системы. Результаты расчета могут также выдаваться в виде чисел, графиков, индикаторов и т.п. Кроме того, пользователь может вмешиваться в работу системы непосредственно в процессе моделирования, изменяя параметры блоков и наблюдая результаты этих изменений.
В РДС имеются удобные способы изображения блоков системы и их изменения в ходе динамического процесса.
Вся система РДС построена
под операционной оболочкой Windows с
помощью C++ Builder и
использует привычные для большинства
пользователей сервисные
возможности.
Главное окна РДС показано на
рисунке 1. В нем расположено главное меню программы (сверху), кнопки управления
(в левой части), панель блоков (в правой части) и кнопки открытых окон (внизу).
Рис. 1 Главное окно программного комплекса РДС
Приведем пример
использования РДС для создания исследовательского стенда подводного аппарата
(ПА), по которому можно составить представление о возможностях программного
комплекса РДС. На рис.2 приведена общая схема ПА
Рис.2. Общая
схема подводного аппарата
Пользователь может моделировать поведение ПА
при разных управляющих воздействиях и алгоритмах управления, заложенных в
стенд, при этом состояние ПА может отображаться на графиках и числовых
индикаторах.
Изменение настроек подводного аппарата
При
необходимости пользователь может изменить различные параметры подводного
аппарата, моделируемого в исследовательском стенде – начальные значения
глубины, скорости и курса, объем и массу ПА, моменты инерции и др., вызвав окно
настроек (рис.3).
Рис.3. Вид окна настроек
параметров
Изменение модели подводного аппарата
Если на
компьютере пользователя установлен компилятор Borland C++ 5.5, алгоритм работы
модели подводного аппарата может быть изменен. RDS поддерживает автоматическую
компиляцию моделей блоков схемы, написанных на языке C/C++.
Кроме модели
ПА в схему исследовательского стенда входит еще некоторое количество
автоматически компилируемых моделей, которые могут быть просмотрены и изменены.
Конфигурации слоев и подсистемы стенда
Сразу после
запуска стенда, как правило, открывается окно главной схемы, в котором
графически отображается поведение ПА и состояние его цистерн. Для того, чтобы
не загромождать изображение, часть блоков стенда размешается на невидимых слоях
главной схемы и в подсистемах, которые открываются в отдельных окнах.
Подсистема
графиков сил и моментов, возникающих при движении ПА, расположена в левой части
окна главной схемы (рис. 4). По двойному щелчку на ней открывается окно,
содержащее графики сил и моментов, действующих на ПА.
Рис. 4. Графики сил и
моментов
Одна из подсистем управления рулями ПА представлена на рис.
5. Эта схема, при необходимости, может быть изменена пользователем.
Рис.5. Подсистема управления рулями
Изменение схем и добавление блоков
Изменение
схем (добавление, удаление и соединение блоков) возможно только в режиме
редактирования. В правой части главного окна программы (рис. 2) расположена
панель блоков, которая служит для быстрого выбора стандартных блоков и
помещения их в схему. Панель состоит из нескольких вкладок, каждая из которых
соответствует определенному набору блоков (“Алгебра”, “Динамика”, “Управление”
и т.п
Каждый блок
в RDS обладает набором переменных, которые могут быть входами, выходами или
внутренними параметрами блока. Входы и выходы блоков могут быть соединены между
собой связями.
В схеме
исследовательского стенда широко используются шины. Шина представляет собой
набор независимых каналов передачи данных, к которым можно подключать связи,
соединяющие эти каналы с блоками или другими шинами. Каждый канал шины, как и
переменная блока, имеет уникальное имя, которое обычно отображается на конце
связи, подходящей к шине или отходящей от нее. Шины позволяют не загромождать
схему длинными связями, пересекающими окно схемы из конца в конец и входящими в
подсистемы – независимо от числа каналов шина всегда отображается в виде одной
линии.
Присоединение полей ввода и индикаторов
Индикаторы,
графики и поля ввода – такие же блоки, как и основные блоки системы управления.
Соответствующие им кнопки расположены на панели блоков. Поля ввода
присоединяются ко входам и параметрам блоков, графики и индикаторы – к выходам
Пульты операторов
На рисунках 6 и 7 представлен вид пультов операторов, выполненный в РДС. В левой части рис.6 сохранено обычное представление курса объекта в виде вращающейся картушки компаса, с грубым и точным отсчетом. Дополнительно введена информация по скорости изменения курса. Положение объекта в пространстве по крену отображается в верхней, левой части видеокадра. Положение по глубине и дифференту отображено в правой части видеокадра. Изображение объекта перемещается по вертикали вдоль шкалы глубины, одновременно изменяя свой угол наклона в соответствии с дифферентом
Для отображения точных текущих и заданных
значений всех параметров создана единая панель в верхней, правой части
видеокадра. Эта же панель используется для ввода заданных значений. Через
клавиатуру обеспечивается вход в строчку «заданный» и далее выбирается
необходимый для изменения параметр. Аналогичным
образом производится изменение ограничений на параметры и рули.
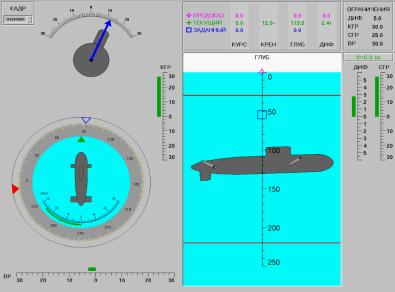
Рис. 6.
Видеокадр с выводом параметров
ПЛ в динамике
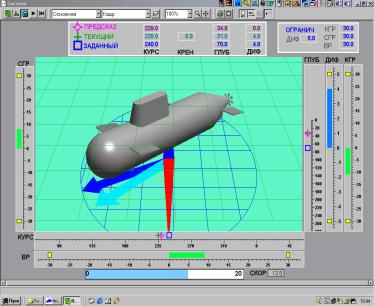
Рис.7. Пространственное представление ПА на панели
оператора
На рис.7
дается видеокадр отображения состояния ПА. На нем дается
минимально необходимая, но в то же время достаточно полная информация о
средствах управления и состоянии ПА в пространстве. Оператору для управления движением предоставляется
возможность оценить ситуацию по трехмерной
картинке и уточнить значения параметров по шкальным приборам.